As some of you may know, I have built two Tarot 650 Sport Quads:

The larger one on the left, which I will call Tarot 1, works fine with respect to its landing gear - they retract when ascending and stay that way until descending to land, they extend. However, the Tarot quad on the right, Tarot 2, behaves differently; the landing gear remains extended after takeoff and during a waypoint mission, and when descending to land, they retract. I tried toggling the landing gear switch in an effort to extend them before landing but was unsuccessful. Before going further, let me state that both aircraft use a Holybro 6C flight controller.
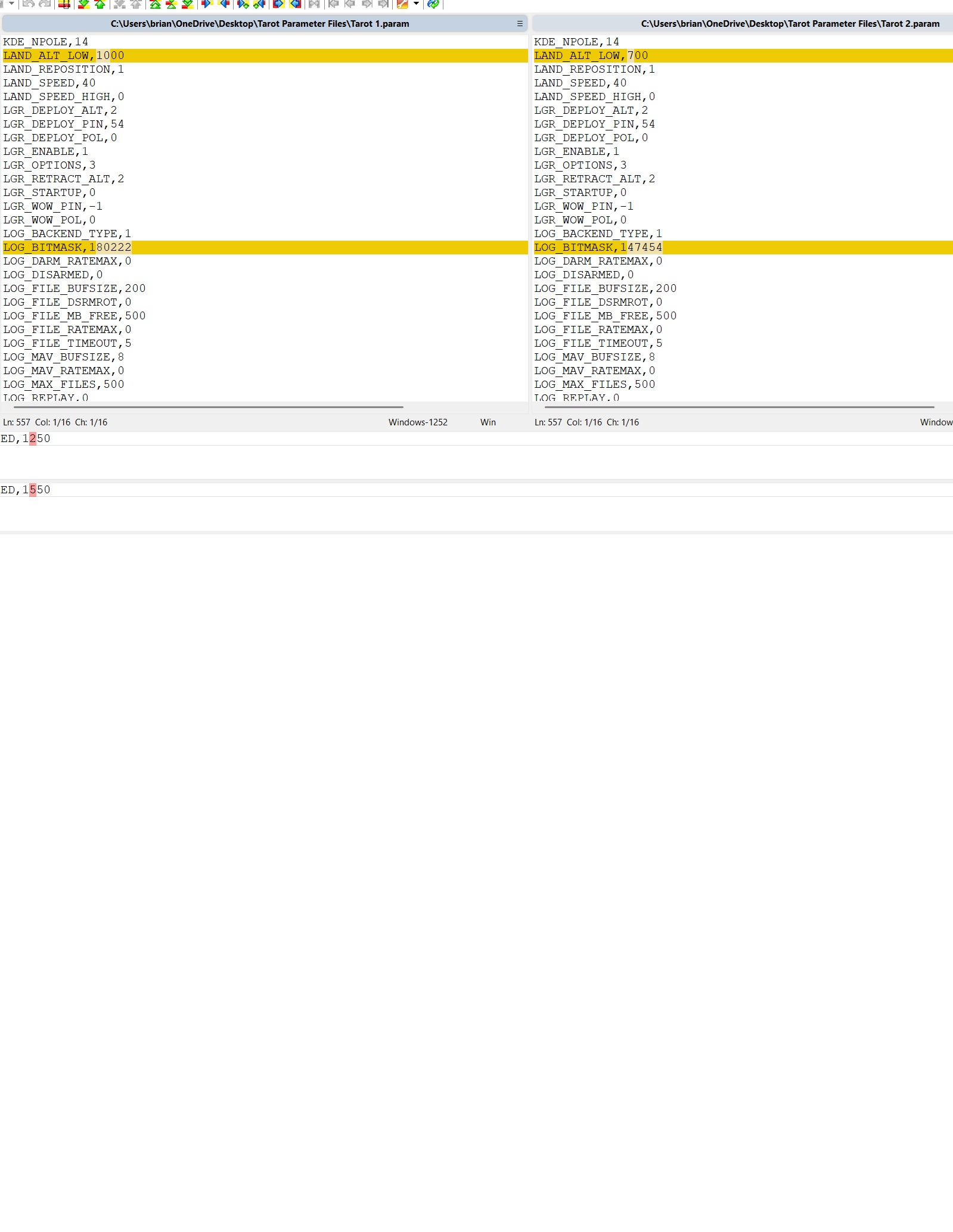
Previously, I compared LGR - specific parameters between the two and found a discrepancy in LGY_DEPLY_PIN values; Tarot 1 had the value 54, so I set the same value for Tarot 2. But this had no effect. I wrote out the parameters from both aircraft and compared. I did find some discrepancies in some other parameters that I need to fix that are unrelated to this problem, but for LGR - specif parms they are identical:
At this point I am at a loss as to what the problem is. Can anyone offer any suggestions?