is it possible to load Arducopter on a Diatone Mamba Basic F405 Mini MK3.5 FC? and if so any guidance would be a great help. thank you Jim Davis
The target for the Mamba F405 MK2 might work.
I will give it a try, I have used Ardupilot in the past it was just APM boards now there are just so many to choose from
thank you
You will have to use a Beta version. From here download the with_bl.hex file and flash with the Betaflight or iNav Configurator. Push the boot button before powering up.
https://firmware.ardupilot.org/Copter/beta/MambaF405v2/
I am also trying to use Mamba Basic F405 Mini MK3.5.
I uploaded the firmware shown below.
I have confirmed the operation of SBUS receiver, Acc, Gyro, Baro and Flash Blackbox, but LED_strip and Buzzer do not work. Does anyone have any information on this issue?
With Betaflight, LED_Strip and Buzzer will work normally as long as you wire them.
I modified two places as shown below, and now both the LEDstrip and a buzzer work as expected.
# External LEDs
#PB3 LED_EXT1 OUTPUT GPIO(30)
PB3 TIM2_CH2 TIM2 PWM(5) GPIO(30) # for LEDstrip
define HAL_NEOPIXEL_COUNT 8
# Buzzer
#PC13 BUZZER OUTPUT GPIO(80) LOW
PC13 ALARM OUTPUT GPIO(80) LOW # set NTF_BUZZ_TYPES 1
define HAL_BUZZER_PIN 80
define HAL_BUZZER_ON 1
define HAL_BUZZER_OFF 0
1 Like
Hi, I’m trying to run Ardupilot on a Diatone Mamba Basic F405 Mini MK3.5 FC as well, but I am struggling with the software.
EDIT: I know that the receiver, ESC, and motors are all connected fine, as I flashed the betaflight firmware and was able to fly with the drone, so it seems that nothing is fried or completely off. When I try ardupilot, I struggle however…
I tried the lastest “stable” version of the firmware (here named “MambaF405v2”) and I also tried the “beta” version from here.
I flashed the hex files using STM32CubeProg for Mac.
My observations:
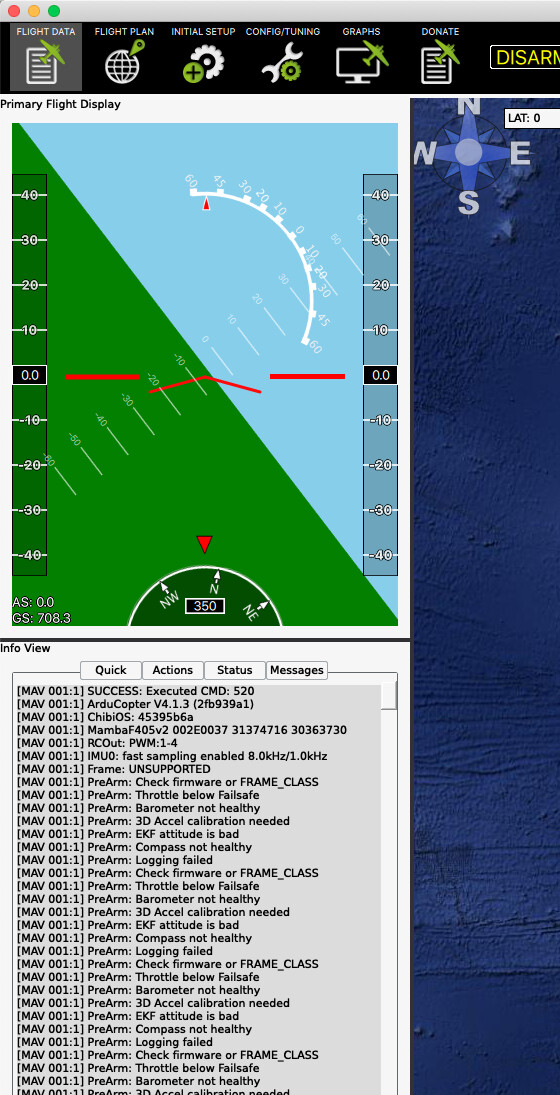
- I can see the accelerometer is working in APM Planner 2.0 and Mission Planner, however, other than that, nothing seems to be working. I am pasting the log that I am seeing in the “messages” tab below.
- I was able to configure the accelerometer successfully (using “Initial Setup” => “Accel Calibration”), even though the virtual horizon in APM Planner looks completely off (
) - I tried configuring the compass, but that failed with an error.
- I tried to do the Radio Calibration, but when l click on “INITIAL SETUP” => “Mandatory Setup” => “Radio Calibration” => “Calibrate” I get an error message saying “Radio Control is not active or turned on” (I did rebind the Radiomaster r81 multiple times and I believe it is correctly bound)
- I noticed that neither the GPS nor the FPV get power when I only plug in the USB so I tried connecting the battery concurrently to the USB, this did not change much. The GPS and the VTX then have power, but the drone is still
- I did notice that the GPS and the VTX transmitter get quite warm (the VTX even so much that you cannot hold it), when I plug the battery in.
- When the battery is plugged in, I get the “ready” “3-beep sounds” about every 35 or so seconds, so I assume the things is in a boot loop? I also get repeated messages about loads of things not working in the messages tab (see below)
Any help would be greatly appreciated!
Best,
Lorenz
Output from the “Messages” view
[MAV 001:1] SUCCESS: Executed CMD: 520
[MAV 001:1] ArduCopter V4.1.3 (2fb939a1)
[MAV 001:1] ChibiOS: 45395b6a
[MAV 001:1] MambaF405v2 002E0037 31374716 30363730
[MAV 001:1] RCOut: PWM:1-4
[MAV 001:1] IMU0: fast sampling enabled 8.0kHz/1.0kHz
[MAV 001:1] Frame: UNSUPPORTED
[MAV 001:1] PreArm: Check firmware or FRAME_CLASS
[MAV 001:1] PreArm: Throttle below Failsafe
[MAV 001:1] PreArm: Barometer not healthy
[MAV 001:1] PreArm: 3D Accel calibration needed
[MAV 001:1] PreArm: EKF attitude is bad
[MAV 001:1] PreArm: Compass not healthy
[MAV 001:1] PreArm: Logging failed
[MAV 001:1] PreArm: Check firmware or FRAME_CLASS
[MAV 001:1] PreArm: Throttle below Failsafe
[MAV 001:1] PreArm: Barometer not healthy
[MAV 001:1] PreArm: 3D Accel calibration needed
[MAV 001:1] PreArm: EKF attitude is bad
[MAV 001:1] PreArm: Compass not healthy
[MAV 001:1] PreArm: Logging failed
[MAV 001:1] PreArm: Check firmware or FRAME_CLASS
[MAV 001:1] PreArm: Throttle below Failsafe
[MAV 001:1] PreArm: Barometer not healthy
[MAV 001:1] PreArm: 3D Accel calibration needed
[MAV 001:1] PreArm: EKF attitude is bad
[MAV 001:1] PreArm: Compass not healthy
[MAV 001:1] PreArm: Logging failed
[MAV 001:1] PreArm: Check firmware or FRAME_CLASS
[MAV 001:1] PreArm: Throttle below Failsafe
[MAV 001:1] PreArm: Barometer not healthy
[MAV 001:1] PreArm: 3D Accel calibration needed
[MAV 001:1] PreArm: EKF attitude is bad
[MAV 001:1] PreArm: Compass not healthy
[MAV 001:1] PreArm: Logging failed
[MAV 001:1] PreArm: Check firmware or FRAME_CLASS
These indicate you haven’t configured a Frame so it’s likely no outputs have been assigned.
Thank you @dkemxr I did set the frame type to “Frame: QUAD/X”, so these messages are gone. I’m still struggling with most of the other elements.
I’ll do some more digging and update the thread 
Give this firmware a try and use Mission Planner:
Mamba F405US
I don’t think the F405V2 is correct for that board.
More detail here:
Hwdef
1 Like
You are a star! The RC input is working now ![]()
(in case someone else has a similar problem, the error message that I got when trying to do the Radio Calibration was “bad channel 1 input cancelling”. This went away after using the correct software as suggested by @dkemxr)
I did find this, as well, and tried fiddling around with the configurations under “CONFIG” → “Full Parameter Tree” using the Parameter Documentation… but I seem to be misunderstanding things, as these settings didn’t seem to help and now, as the radio is working, these settings are as “wrong” as before: For example, the SERIAL1_PROTOCOL is set to 2 (MAVLink2) even though I have a Radiolink R81 receiver connected to RX1 that uses Frsky D as the protocol, so I would have expected that this would need to be set to 3 (Frsky D), but it seems to work even without this.
I guess I will have to do a lot more reading to understand what is going on here!
Quick update for others that might run into this issue:
The F405US board that @dkemxr suggested above seems to be the correct board for the Mamba Stack Basic F405 Mini MK3.5 Stack 40A 6S 8Bit as I got the radio configured, the accelerometer configured and even the compass in the Beitian BN-880 GPS & Compass that I have was working, after connecting the battery to the quad. It seems that many of the sensors do not have power without the battery.
Unfortunately, plugging in the batter may also have been the reason for me frying the motors (and possibly the ESC) during one of the soft-reboots that were required by QGroundControl 
I would be really glad for any comments around this. Does a soft-reboot with a connected battery really fry things? (I have asked for comments on this in their section of the forum)
@Lorenz_Fischer I have almost the same setup as you (Mamba F405 MK3, BN-880) and am trying to migrate from BetaFlight to ArduPilot. Did you ever get your hardware running? I really just want some setup that will allow me to do autonomous flights.