I am using a quadcopter with 15-inch propellers in X configuration with square tube arms to maintain alignment. The flight controller is mounted with damping.
During hover in Loiter mode, the drone is stable and no significant vibrations are observed. However, during aggressive pitch and roll maneuvers, vibration spikes appear. These vibrations are more noticeable during pitch-up and roll-right movements.
I have already performed the following checks:
Replaced propellers to rule out imbalance
Inspected motors — no visible shaft damage or dents
Verified arms — no twisting or misalignment found
Adjusted center of gravity to exact center — no improvement observed
Observed during tuning that Motor 1 consistently runs at higher PWM compared to other motors
Current observation:
Motor 1 always operates at higher PWM, suggesting thrust imbalance or higher load on that motor, which may be contributing to vibration during aggressive maneuvers.
Request:
Looking for guidance on identifying the root cause of vibration spikes during aggressive maneuvers, especially related to motor thrust imbalance, frame resonance, or tuning/filter settings.
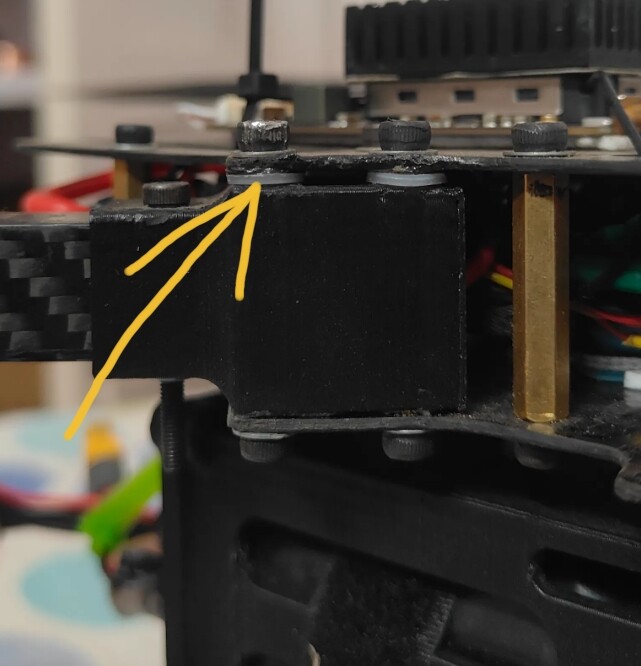
Are they tightly pressed into the mount? I have experienced that a bolts prevents “large” movements (and rolling) but will allow a tiny amount of play, making the arms able to vibrate.
I would personally use something like a clamp with the arms going in at around 30mm.
I have a holybro 650, and experience significant image vibration, and am trying to limit the problem for better video when the camera is zoomed in. I have found that the highest angular motion (not angular rate) is at about 60 Hz (propeller rotation frequency). This with measured with an external BMI160 IMU mounted on camera. When I attached 8mm carbon fiber stiffeners between the motors (using 3d printed soft tpu mounts), the 60 Hz went down greatly as well as other vibration frequency amplitudes.