Hi, I am developing a full scale unmanned winged tiltrotor vtol similar in function to the Convergence RC model. The vehicle has 4 large wheels and is 15ft long, 8 ft wide and 3.5 feet high. It has two tilt rotors in front and one motor behind the cockpit for verticle flight mode. It has double elevons and double rudders for airplane mode control. It looks like Can Am race car. I am using four Q100-5L Hacker motors 10-11kW 137KV, 32 in x 10.7 in Mejzlik props, and 4 Fatboy 300 A ESCs, and 2-4 Tattu 22Ah 14S batteries. The vehicle weighs 150 lbs and is built out of 1 in foam sheeting with 2 oz fiberglass cloth. I am using some plywood, and carbon fiber for reinforcement. I am using ArduPlane software, Pixhawk Orange Cube flight controllet, Tiranis X9D Plus 2019 transmitter, and frsky rx8r receiver.
The 2 front motors are counter rotating, and the 2 motors in back are coaxial counter rotating and placed back to back. They blow their thrust through a hole in the wing, just behind the cockpit.
I have built and tested several 1/6 scale foamboard versions of the vehicle, and they fly very well. I am from San Diego California, but I am building the full scale model in Sweden.
The full scale model is almost finished and we have started to test it. The vehicle can support it weight and we have taxied it on the street. I experimentally determines the PID values by carefully balancing the vehicle on 2 saw horses at the vehicles CG and firing up the motors so that I can study the vehicle as it tries to use the flight controller to stabilize it.
I used a pull test to determined the thrust generated by the front motors. They generate 64 lbs thrust each, where as 80 lbs was expected.
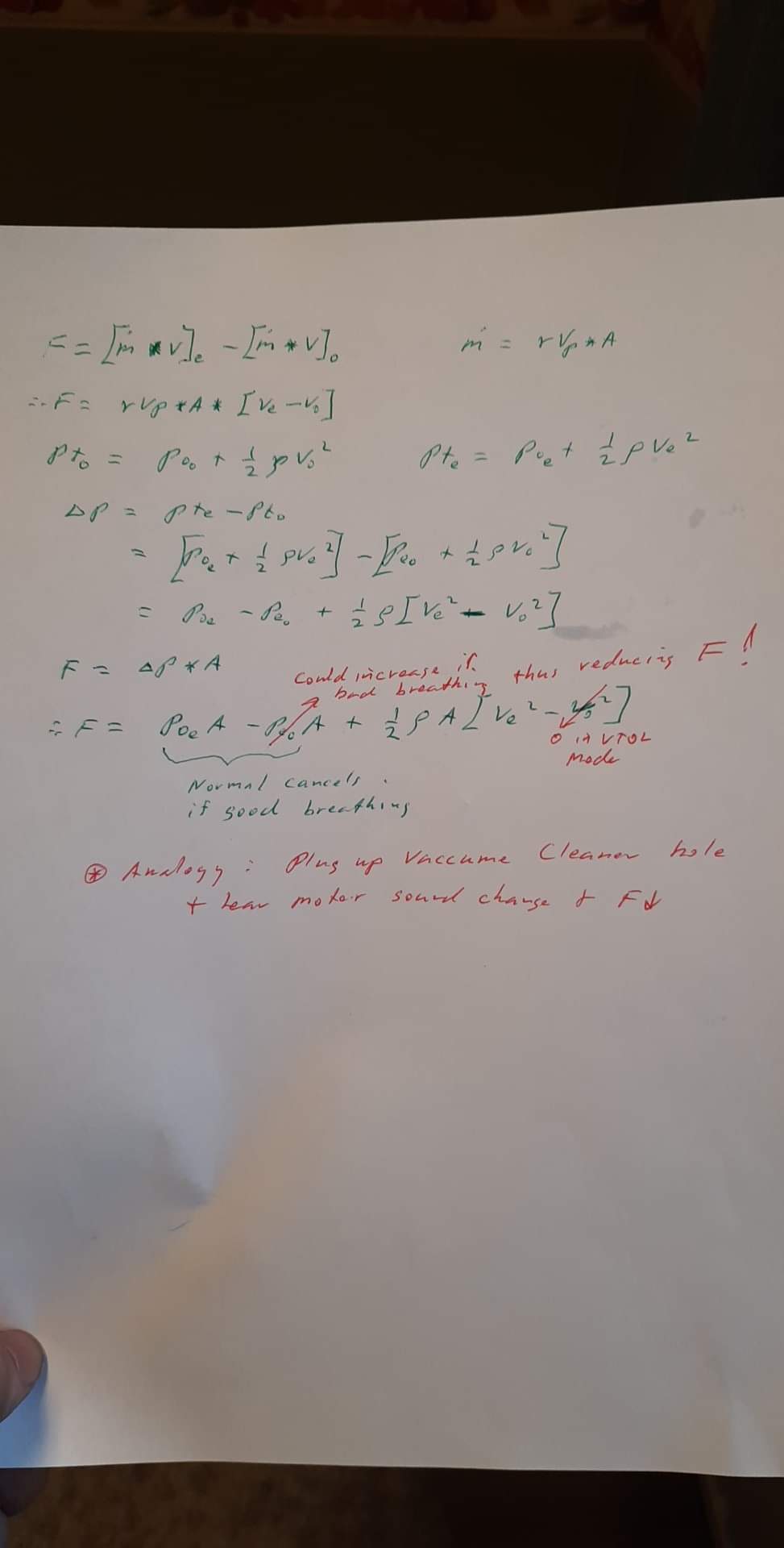
I tried to hover the vehicle, but it would not take off. The front motors can easily lift the front end of the vehicle. But the back motors will not lift the back end. The coaxial prop motors in back should be able to generate enough thrust to lift the back end. When we lifted the back end with 2 people.while at full throttle, the back end suddenly lifted with great force. It is looking like the pressure is building up in the back because the opening in back may not be big enough for the air to get out fast enough. The opening in back behind the coaxial prop motors is about 6 ft wide and about 3 ft tall. If this is the problem then we can cut the bottom of the side panels housing the wheels, so that the air vents from the back motors better. Currently the side panels are about 6 in from the ground. I have never used coaxial motors, so I am not sure what to expect. The 1/6 scale model uses only one motor in back with a 3 bladed prop, where as the front motors use 2 bladed props. To cancel the torque, the back motor is tilted a little to the side.
When we manually lift the vehicle about a 1.5ft, the vehicle the back end lifts. Cutting 1.5 feet off the bottom of the side panel is doable, but less would be preferred, since we want to use the vehicle on the water, using the side panels as floats. If we cut too much of the side panels, then the front props will touch the water.
Another possibility I am checking into is that we could tilt the motor slightly to help blow the air toward the back, or we could use non-counter rotating motors in the back and tilt the motors a little to the side so that the thrust is blown under one of the side panels.
I must say, I am very surprised about this problem. The 1/6 scale model lifts in VTOL mode very well, but it is not using coaxial motors, and the motor is located above the hole in the wing, and the motor is tilted a little to one side to counter the torque.
Does anyone else have any ideas or comments?
Below are pictures of full scale vehicle. Note cockpit not mounted yet.
20210723_191605|666x500




Link to see 1/6 scale vtol test flight:
https://drive.google.com/file/d/1fSrr22Kh5rR_39nCc20a9UxKJXfvGmig/view?usp=drivesdk
Link to see demo of fill scale vehicle using RealFlight 7.5:
https://drive.google.com/file/d/1AAvC3BLvut7xjlhY81S9EqD8OW0Qw-kS/view?usp=drivesdk
{kind=link}