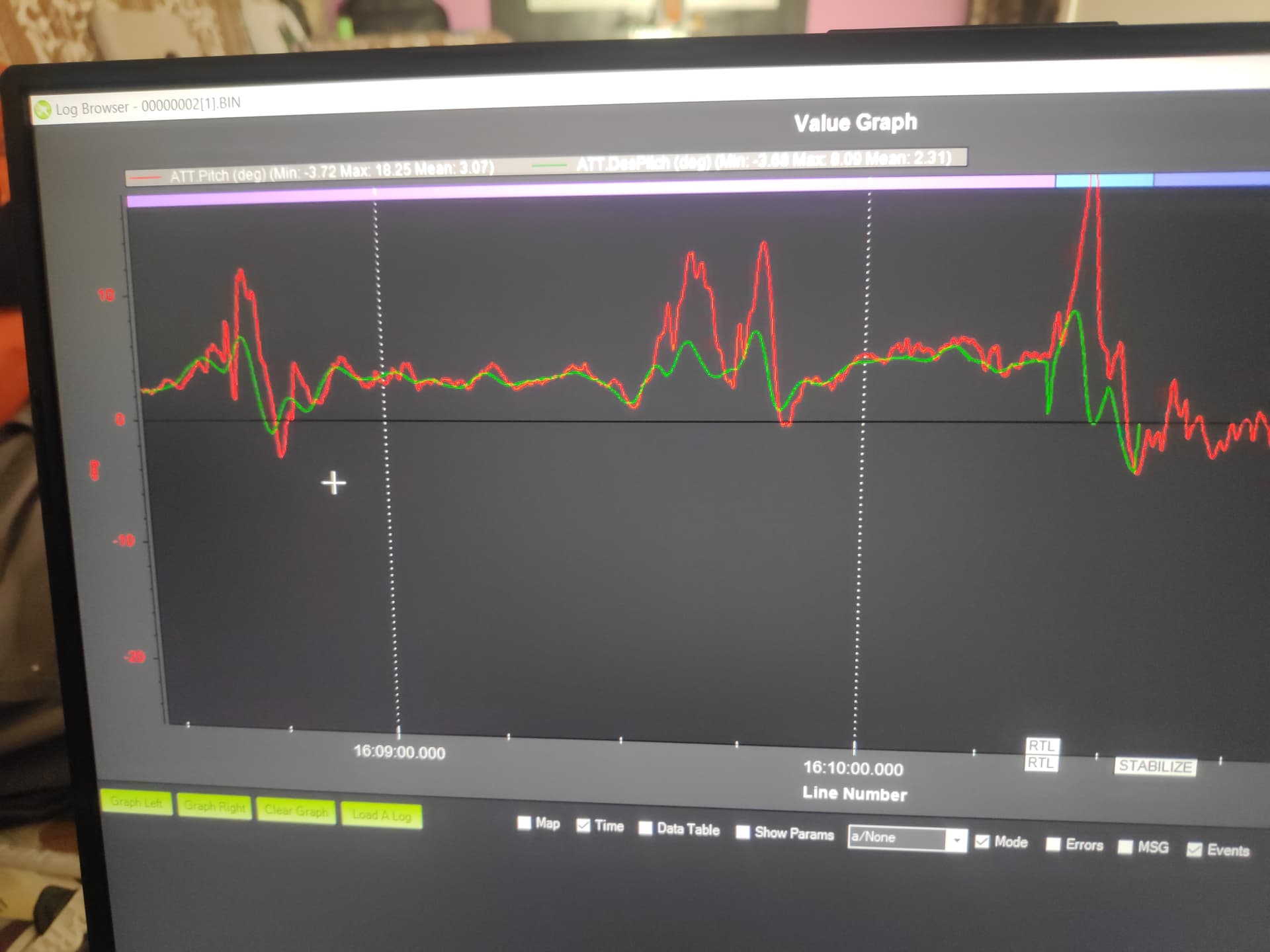
Can somebody please put light on what can cause difference in desired roll/pitch and actual roll/pitch values.
Consider that theres no mechanical issue and all servos and actuator mechanism is working fine
Can somebody please put light on what can cause difference in desired roll/pitch and actual roll/pitch values.
Consider that theres no mechanical issue and all servos and actuator mechanism is working fine
Basically poorly tuned (or never tuned, flying with default PIDs) vehicles (PID values) struggle to follow desired roll and pitch angles.