Hi,
I am thinking to revive my large octo from 2 years ago and do some design modifications to reduce physical size. It originally used 8 24" props which led to a tip-to-tip wingspan of 2.4m… not practical.
I would like to reuse the props and all other components for cost reasons. I would like to maintain a classical octo layout too (props separated by 45°) for least thrust loss (trying to maintain the 10kg payload lift capability of the original design).
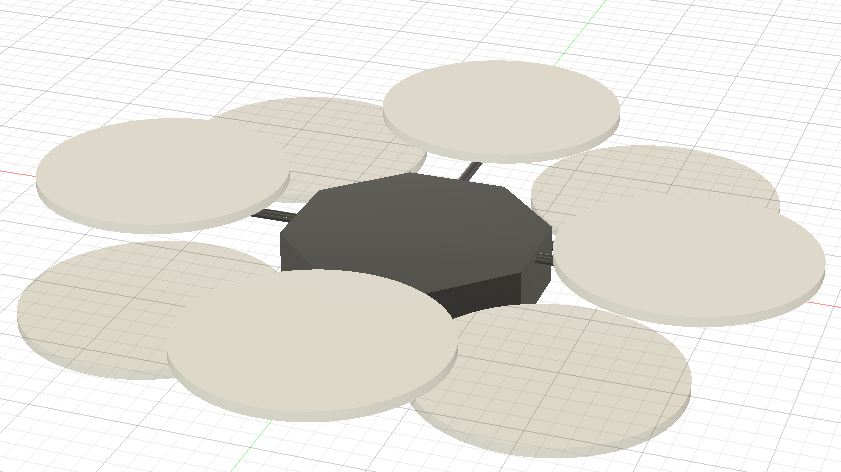
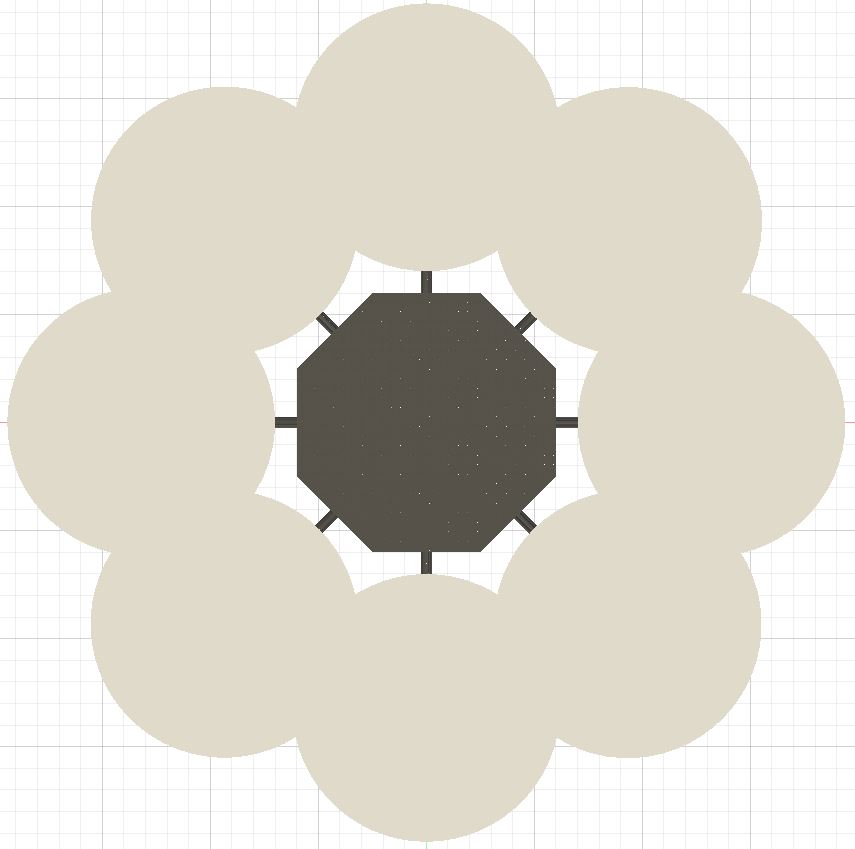
My idea is to place 4 props each on two “planes” in a normal + config with sufficient vertically clearance (e.g. 0.15m). The upper plane would be rotated against the lower plane by 45° so that viewed from above you would see a normal octo config.
This design will only have a 13% overlapp of the props and should thus have minimal thrus loss compared to a regular octo setup. And it should be more efficient than a QuadX8 config with coaxial props.
I am thinking that arducopter should be able control this config just like a traditional octo setup as prop distance and rotation direction are identical to an octo. Especially in perfect hovering/vertical movements.
The only thing I am not sure about is if there will be any thrust vectoring issues when the copter is tilted as the props will not all be on the same “plane” and therefore, depending on where the centre of gravity will end up being, the device could react differently than a normal octo.
I nicknamed this “Octo2Plane” for now…
Has anybody tried this?
Any reason to think this will not work with copter 3.6?
Thanks for any advice,
Christian
P.S. I am attaching schematics to explain the concept better.