I’ve been fascinated by coaxial drones for some time now so I decided to design and build the simplest example of one I could. From the outset I’ve known this isn’t going to be an outstanding performer (I’m aware of some limitations and drawbacks of such a design) but decided to go ahead with it because, hey, there’s not too much else going on at the moment. I’ve also decided to make the whole project available for everyone to download, improve upon, tune better and basically just have some fun with. In the bottom of this post I’ve added a link which should give you everything you need to get to the same point I’m at now- CAD files, STL files, item lists, an assembly drawing, firmware and my initial (poor) parameter list.
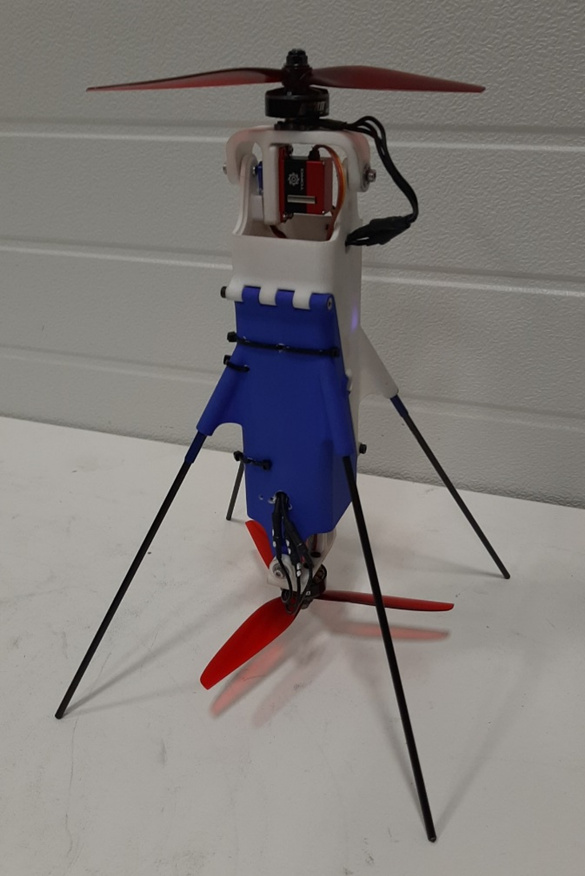
Arducopter supports coaxial drones where the yaw control is provided by differential motor/propellor torque and pitch and roll is controlled by passing the downwash over control surfaces. However, I decided to go a different route and achieve pitch and roll control by independent thrust vectoring of the props. To pitch forward, the top prop is rotated with a servo about an axis above the COG of the drone, causing a forward pitching torque. Likewise, with roll, the bottom prop is rotated about an axis below the COG of the drone causing a rolling torque. All up there are just the four actuators- two motors and two servos.
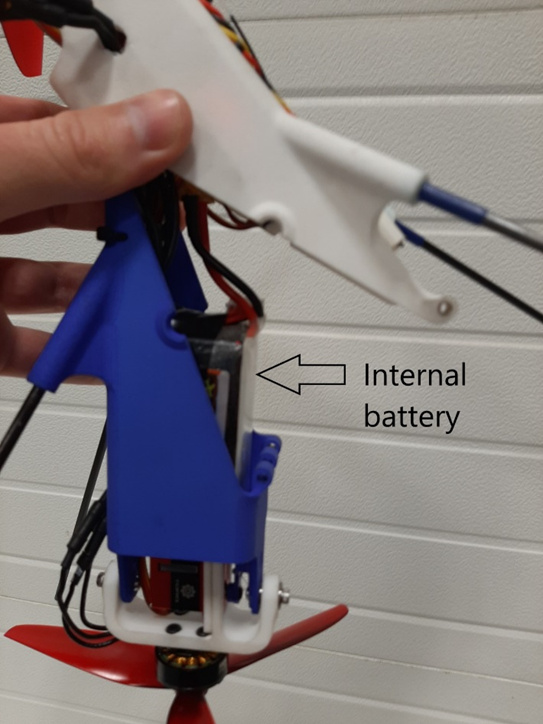
The drone was designed in Solidworks and made use of some components I already had laying around. The parts were 3D printed at Shapeways out of Nylon 12 material (“Versatile Plastic”). I’m quite proud of how neatly it turned out; almost all of the wiring and components are internal, including the battery.
I decided to use the Matek F405-Wing flight controller because it’s almost perfect for this application. It has an inbuilt 5V power module for the flight controller, power and signal distribution for two motors and an in-built BEC for the servos.
Some questions that you may be wondering:
Does it fly? Well, yes, but not that great just yet. I’m still in the tuning phase. I have one small snippet of it flying though (apologies for the atrocious audio and video): https://youtu.be/LSyZhLYHXaQ
Will it do a flip? Probably, in fact I’ve almost flipped it accidentally.
Is it useful? Not really. But it is fun and a good learning experience.
Do gyroscopic forces affect the control system? Why yes they do, quite a bit. For example, when pitching the top propeller forward, gyroscopic precession imparts a rolling torque onto the airframe. To counter this, I’ve added a feed-forward term to the Coax Copter code which adds a portion of the pitch PID output to the roll output and vice versa. So when pitching the drone forward, the top prop pitches forward and the bottom prop pitches sideways to counter the torque imparted by the top prop pitching forward. This parameter is called MOT_RP_FF.
What does it weigh? Roughly 500g with battery according to the CAD model.
How much power does it need in hover? About 100W. So efficiency is about 5g/W.
Can I 3D print it at home? I’m not sure- the SLS printing at Shapeways allows me to print some geometry that isn’t well suited to FDM printing. It would likely need a slight redesign for printing with FDM.
Thanks guys. I’m very much aware of the mars drone, it’s a marvelous piece of engineering. Unbelievable it will be able to fly in such a thin atmosphere.
Weirdly I’m as busy as I’ve ever been at work at the moment but hopefully should have a decent video this weekend as well as the Solidworks files.
Thanks everyone for your support! Apologies I don’t have as much time to commit to this little project as I would like. I did however have time to do two batteries worth of tuning today with some mild improvements and will share some learning below.
the tuning of either roll/pitch is quite hard to begin with due to the servo actuation (I seem to recall reading in the early days of TradHeli there were quite a few trials and tribulations before they discovered the addition of the feedforward term to assist the rate PIDs; a similar approach doesn’t seem to work with this airframe)
the tuning difficulties are compounded by the fact that I designed it such that the centre of gravity is closer to the roll servo/prop and further away from the pitch servo/prop which affects control authority. So pitch and roll need different tuning. Which leads to the next problem:
because the gyroscopic forces of the pitch servo/prop import a roll torque on the drone (and vice versa), a poor tune in pitch can in turn impact the roll performance (and vice versa)
There’s a fair bit of backlash in my top servo that may or may not have been caused by a crash
Hopefully I can get someone to film some flights tomorrow, they’ll have to be indoors due to the wind here. I’ll be sure to post some if I do.
That’s a great idea and it had crossed my mind to add some wings and turn it into a VTOL tailsitter, unfortunately though I have no experience with fixed wings so perhaps someone else will turn it in to reality. I’d love to see it.
Tail sitter…hmm its on my list of projects. I am currently tied with 5 developments already VTOL (reg. not a tail sitter), Hexa Quad, Agricultural UAV x 2 and a Rover, Not to Mars but for my backyard
I know what you mean, so many projects and so little time… at least we have the awesome Ardupilot developers constantly working on the code side of things
It tends to develop a roll oscillation with fast forward flight - I haven’t looked at the logs yet to determine if it’s a P, I or D oscillation. But more worryingly:
It’s now apparent that there’s quite a lot of cross-coupling between yaw and roll/pitch. This occurs with either roll or pitch output is non-zero (ie. the servos are tilted away from the centreline of the body) and yaw is commanded. Because of the off-axis application of yaw torque with respect to the body, this applies a pitch or roll torque. This is definitely more of a problem with outdoor flight due to wind.
Apart from all the issues it’s still possible and quite fun to fly provided you learn all the quirks
Thanks, motors are T-Motor F40 PRO II 1600kv, props are HQProp DP 7x3.5x3.
But I’m thinking of going to a two-bladed prop with a more aggressive pitch (such as the APC 7x6E and 7x6EP) because they should in theory spin much slower for the same amount of thrust, reducing the gyroscopic forces and making the thing fly better.