Hi everyone,
I am trying to do precision terrain following using TF03 rangefinder (in downward direction) in loiter mode.
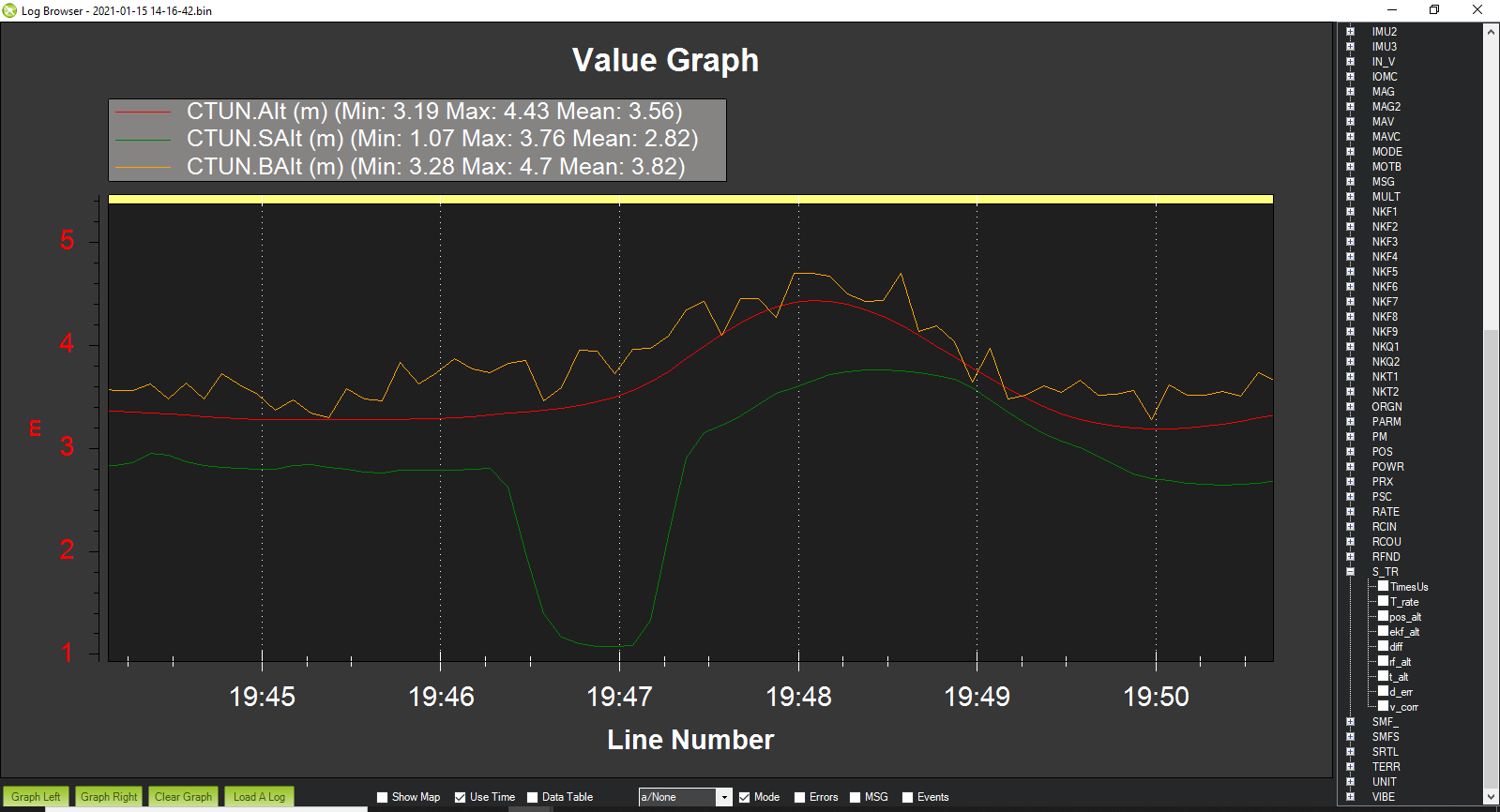
The copter is able to gain height when rangefinder saw some obstacle but what I observe is that it changes height after some delay and also on increasing speed the gain in height is also low.
Is there a way to do precision terrain following without delay, just using rangefinder in loiter mode