i just ran a short test using my 6" rooster - it felt very nice and very smooth with the filter. it is a 4S model with 2206-2100kv motors. i ran it for the test using same params overall that were set on a 3" and 4" models - with filters at 80hz, only lowered harmonic filter to 80hz from 100, but, it seems it was not needed as ctun->n was again set in the log in the 105-123 with mean of 114 range during hover. with throttle kicks it goes into 180-220 area. overall it felt very stable. rooster6kakute110919.param (21.5 KB)
now the next thing, when/if i will have a nice calm day and some time will be to autotune them all using this new filter and compare results.
PS: for position hold stability i think it is often missed to set PSC_ filters high enough - i set now all 3
PSC_ACCZ_FLTE, PSC_VELXY_D_FILT, PSC_VELXY_FILT to 80Hz and it seems to be working well.
I’m coming back to this, so we can get a good starting point for people w/ small copters. I’m sure we can get a set of parameters that will get the majority of people flying well enough to auto-tune, even with prop and battery differences.
I recently finished setting up a couple copters from scratch, and am building a 3rd now.
I’m using a few different motors and props (all 3"), but the same 2s batteries on all of them. The same PID’s work fine on all of them. (I can tune some higher, but the lower PID’s work fine)
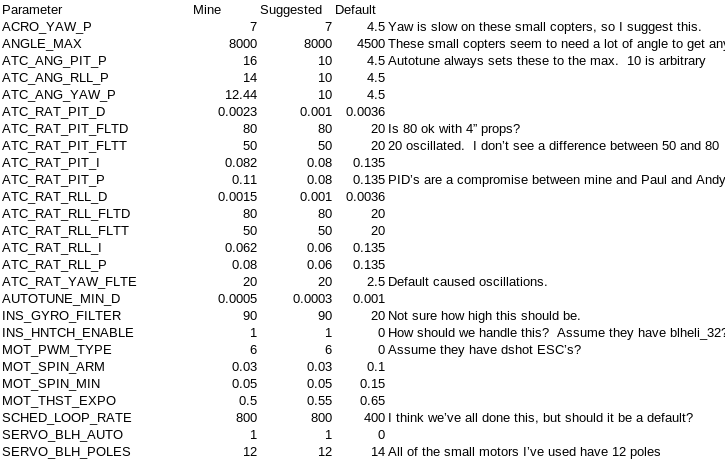
Here are the values I think we should include. My values, My suggested values for small copters, and the defaults are there for reference.
I guess the main questions are;
Are the PID’s ok for you guys with 4s? Would @andyp1per, @Paul_Atkin1, or anyone else with 4s batteries be willing to test? They’re loose for me and I’d have problems flying aggressively, but they’re good enough to autotune. They might be a little shaky on 4s, but again, maybe good enough to hover and tune. I left the yaw PID’s at their defaults, as that is already a compromise between mine and the 4s guys.
What should we do about the notch and ESC telemetry? The notch helps a lot, but I don’t think there’s a safe default configuration for it, without telemetry. It’s probably safe to assume that soon any new small 4 in 1 ESC will have telemetry, but that’s not quite the case yet.
I have also increased my speeds for loiter and auto modes, and made the GPS more forgiving to signal problems. I think that’s necessary on these small copters with tiny GPS’s, but maybe not something that should be default.
Here are my parameters if you are interested in all the changes I’ve made. CurrentParams.param (20.0 KB)
I’ve just totally destroyed my 3" Gecko by leaving it on the roof of my car and then driving off. After several cars drove over it there is not a serviceable part left - I will have to start from scratch so cannot test anything right now
OH NO, I’m sorry to hear that. I lost my cell phone that way.
I was testing a new copter a few years ago, and while trying to do some high speed vertical runs, it kind of went crazy. I fought it all the way down and managed to lightly crash in the middle of my street. As I’m walking up to the copter a lady runs over it w/ her van. She realized she it it and waved and said sorry… but as she was waving and saying sorry she kept pulling forward and hit it w/ her back wheels as well.
I don’t think I was able to save anything from that crash… (It would have been fine if she didn’t hit it, though :()
I would limit the lean angle to 60 because 80 would be one hell of a shock for a person to start with. This is a parameter that people can tune easily to their liking so I would tend to stick with 45 for people to start with.
Most of the ATC values were ok. I would tend to drop FLTT parameters a little if we can. I would be interested to know when you start to be able to detect the change. If it is still undetectable at 50 then it tells me we are letting noise in we don’t need to. I would drop it until I could just start to detect the impact on the control loops. This will remove or smooth the gyro bias corrections a little more and minimise noise in the rate loops.
The main parameter I am sceptical of is the Yaw_FLTE. I would need to see the results of autotune but for a small aircraft it may go a little higher like 4 but 20 may be causing yaw oscillations that are too fast for you to see unless you have reduced the yaw P term.
H_Notch must be setup so that is a process that must be followed.
OK, Lean angle, I really think the default was too low for these… There are times I’m flying in to a wind where I really do have to be at a steep angle to get any forward momentum. And, the motors are so powerful that at 45 degrees I think you’d mostly be flying UP and not forward. But, I agree, 80 is probably too high.
I will try to test different values of FILTT and Yaw_FILTE later today.
About the notch and esc, we could have a suggested build which uses blheli_32 ESC’s. And in that case, I think we could enable the notch. I think something like this would cover the majority of 3" and 4" copters:
INS_HNTCH_ATT,30
INS_HNTCH_BW,55 (Mine is 70)
INS_HNTCH_ENABLE,1
INS_HNTCH_FREQ,110 (Mine is 140)
INS_HNTCH_HMNCS,3
INS_HNTCH_MODE,3
INS_HNTCH_REF,1
I’m imagining we’ll have a small copter page in the wiki. So we could say suggested is w/ telemetry. If you don’t use telemetry, set your notch to static or throttle based, and link to the harmonic notch instructions. Otherwise we do the opposite and say if you do have telemetry it’s recommended to enable the harmonic notch and link to the instructions. I guess it doesn’t really matter either way if people are willing to read instructions…
One last thought… we might need to change a couple parameters related to alt_hold.
I believe I had oscillations before increasing psc_accz_* filters. At least it looks like my PSC_ACCZ_FILTD is at 40… Hmm… These changed w/ 4.0 and I haven’t experimented with them since then. Someone yesterday was posting about having oscillations w/ the defaults on a small copter. Any input from @andyp1per or anyone else?
I’m late for work so will follow up later… but it looks like you were discussing this around October:
I’ll do a bit of testing w/ those parameters later, too.
About PSC_ACCZ_FILTD, does that do anything if we have no D set for ACCZ?
I set that to the default of zero, and didn’t notice any change. FILTE is at the default of 20.
So, it seems all the default alt_hold parameters are working for me on this 2s copter. I know I had problems w/ the defaults in the past, but that was a couple years ago and I guess things have changed since then. @Paul_Atkin1, how is your alt_hold performance? It looks like yours are all on the defaults, and you’ve got a more powerful copter then I do.
Andy’s PSC_ACCZ_P and I are both quite low. So, I tried 1/2 of the defaults, and they worked fine. So, if we think the small copter settings should be lower, it does work for me. (I think this is more of an issue on 250 size copters for some reason… The person who posted about alt_hold issues the other day in the 4.0 forum was tuning a very powerful 7" prop copter, and he had to decrease P and I quite a bit).
About Roll and Pitch FILTT, the default of 20 appears to be working. I think at some point in the master/beta/4 history the filter defaults were different than they are now, and those didn’t work.(They might have been zero when the filter was first put into master or something). Seems OK now.
Yaw FILTE at 5 is working great. 2.5 wobbled back and forth a little.
So, now I have
ATC_RAT_PIT_FILTT = 20
ATC_RAT_RLL_FILTT = 20
ATC_RAT_YAW_FILTE = 5
Just did two fresh builds of devFrames at 300 size. Running 3S on 6in props but 5in and 4S could work too. Is there a sense that 300 is big enough not to worry about changing from defaults to get to autotune? So far I have just done hover checks with dynamic notch (both have ESC Telem) and carefully following @Leonardthall awesome tuning wiki page. Yaw is a bit sloppy but they seem to be hovering good enough to get to tune. Running 4.0.1 on both btw. I can report back here if you think the data will help.
I just read through the new tuning guide in the WIKI, and it’s great! I think if you followed it, you should be fine. Looks like it says to increase your gyro filter to about 80 for 5" props (close enough to 6"). If you’ve done that, set your pitch and roll FILTD, and have the notch configured, you’re probably safe to auto_tune. Like the WIKI says, if you notice any oscillations, land and lower the PID’s.
About Yaw, I had some little oscillations or twitches and overshooting in yaw after auto tuning. Decreasing the PID’s made them worse. Increasing them made it better.
So, the answer to oscillations is not always decreasing the PID’s. I still don’t fully understand it…
I’d like to see what you end up with after tuning. Let us know the vehicle weight, prop details, motor details, battery voltage (S number), and upload your parameters if you want to share the details.
Can’t find a parameter reference for FILTD - What am I missing?
Just followed the changes on the wiki. Running at 60 vs 80 for gyro filter. Pretty stiff and heavy for a 300.
Got two axis tuned before sun set on me. Hopefully gets above freezing tomorrow so I can get back out with a couple more batteries. Will report back here with more details once tune is OK.
Also note that I have not touched default for loop rate. I will double check but likely still at 400.
Luminier 2206-13 2000kv
gemfan 6045
luminier 36A blheli32 w telem
3s 1500
AUW 1.6# or 725 grams
60 for gyro filter. other values all per tuning wiki page using provided charts. Will have a complete recipe on devFrame wiki soon. https://github.com/goodrobots/DevFrame/wiki
I am getting ready to rebuild this one as a 450 so here is full param file.
PixRacer w/
Telem
GPS
Frsky Passthrough Telem
ESC Telem
TFMini
ThoneFlow
Used every UART on the thing. Rebuild will be same but bigger motors and props as need a bit more flight time. Will be doing another d300 build with a Kakute F7 if I don’t fry this one too. I will share the params for the F7 build once it flies. Hope that helps.
If you’re going for maximum time, rather than max power, you might want to think about trying 18650 li-ion’s. You’ll have to build your own pack, but they have a higher energy density than lipo’s.
The negative to them is long charge time, and relatively low discharge rate. But for normal flying, the discharge rate has been fine for me.
Good point. I get 2-3 times battery capacity and about twice the drive efficiency by going from 6in 300 to 9in 450. Thats lipo to lipo.
I think I have the d300 flying on kakute f7. It was one of those cursed builds. Think I went through a dozen props. Will share params after tune this weekend.
Having a bunch of issues with kakute f7 and tekko32 4in1. Appears that voltage goes to 0 on at least one esc before it dies and crashes.
While not directly a tuning issue i get the feeling i am having dshot and or esc telem issue due to an improper setting. Pwm update rate?
Running dshot150 on a 400 main loop. I can start a new thread if you feel this is not related to the main topic here. I am getting my ass kicked by sub300 fpv gear. Used to bigger stuff and don’t have much fpv experience so perhaps there is value to keep in this thread for others like me?
EDIT: Thought I had it all sorted with change to main loop to 800 and reflash esc to 32.7…best flying quad I have flown with default PIDs. AltHold and Loiter really nice for stock. And then a few minutes into autotune motors cutout; it flips and recovers. Going to start a new thread to ask for some more eyeballs on this one and not hijack this thread.
Edit2: Fixed issue by supplying GPS Module with it’s own 5V source. @wicked1 suggest that a capacitor on the 5V bus may do the trick as well.
Does it make sense to take a systems approach and address this type of info for small builds as well:
I did not really see a resolution in that thread. And with AC supporting more and more hardware it has become difficult to keep track of the settings you need for success.
EDIT: Here’s what I ended up with for d300 on Kakute F7 and Tekko32
BLHeli 32.7 All defaults except timing set to Auto and reverse two of the motors
SCHED_LOOP_RATE 800
DShot 600
Have not tuned it yet as wind is 10 w/ gusts to 20.
I completed a successful autotune and it seems to fly pretty good with an exception. When you give it full stick inputs and gain some speed, when it tries to stop in loiter mode it starts to oscillate, like the braking angles are too high. I had to switch it back to stab to prevent it from crashing. Here’s a log of the flight. https://drive.google.com/open?id=1p8UyPc56orX-goPDXp6BxJQwIch_r-Pj