Hello everyone , i hope all are happy 
Recently I was thinking about what about next after octa , so now I want make decacopter and check how it’s stability. Can anyone tell me something about this topic , i appreciate that
Thank you 
Hello everyone , i hope all are happy
Recently I was thinking about what about next after octa , so now I want make decacopter and check how it’s stability. Can anyone tell me something about this topic , i appreciate that
Thank you
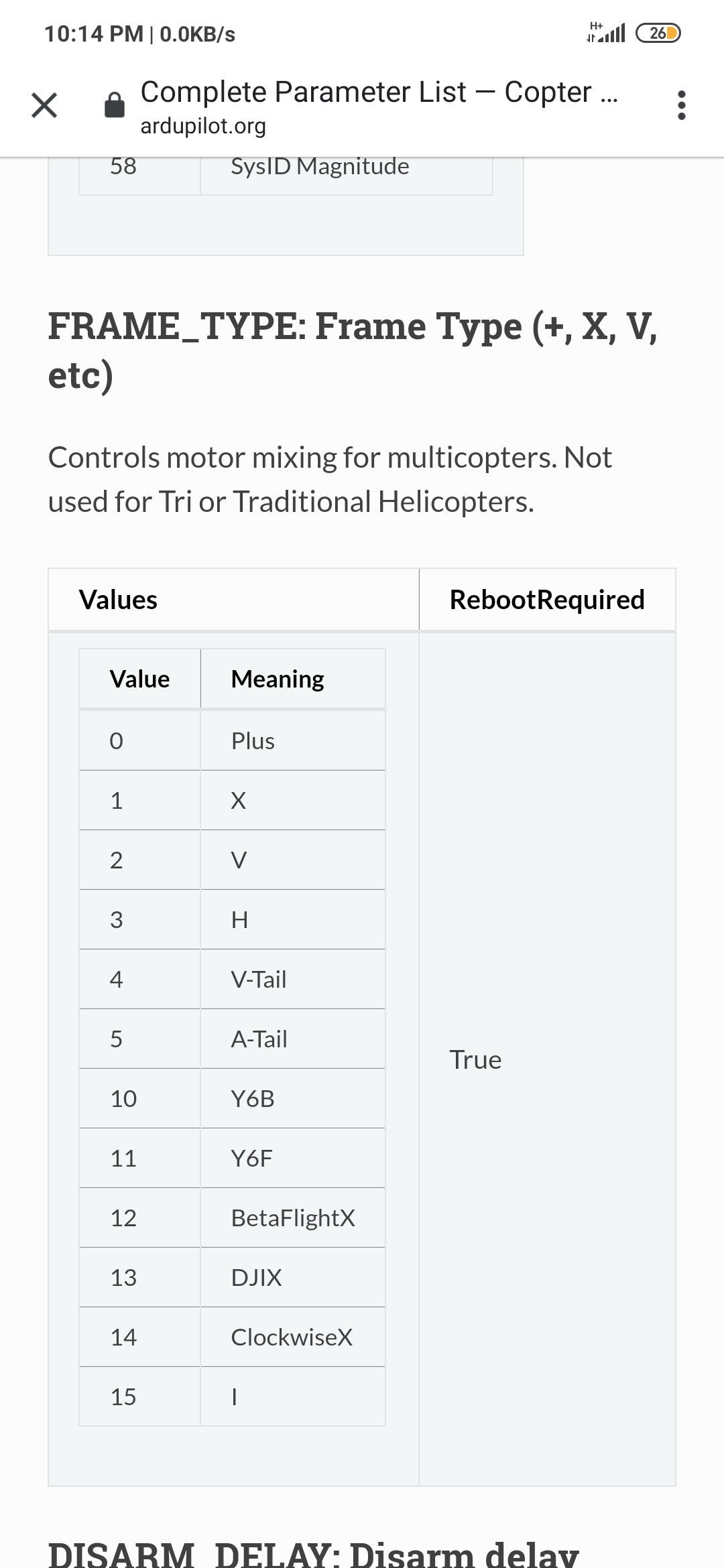
dodeca is available. deca not yet supported according to https://ardupilot.org/copter/docs/parameters.html#frame-class-frame-class
But is is very easy to add support for it. just four lines of code in motors.cpp or something like that
Sir I’m simple student , so I don’t know about .cpp coding can you tell me know more about how it’s possible to make sure it’s actually decacopter.
And there is only few frame available like this
Thank you
Like this sir ?
![]()
Yes that is the file. You need to duplicate lines 794 to 828 and adapt them to your deca frame.
But sir which 794 lines , once again I’m simple student , try to understand and …
Thank you
Not 794 lines. I said lines 794 to 868. That is just 74 lines of code!!!
And you just need to remove two motors and edit the arm angles. That is an easy exercise for a student like you.
Recently I found this video and trying to figure out how to do it.
Now I’m not sure is it right for decacopter ?
add_motor_raw(AP_MOTORS_MOT_1, 0.007, 1, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 1);
add_motor_raw(AP_MOTORS_MOT_2, 0.577, 0.777, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 2);
add_motor_raw(AP_MOTORS_MOT_3, 0.954, 0.294, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 3);
add_motor_raw(AP_MOTORS_MOT_4, 0.931, -0.313, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 4);
add_motor_raw(AP_MOTORS_MOT_5, 0.574, -0.814, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 5);
add_motor_raw(AP_MOTORS_MOT_6, -0.006, -0.968, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 6);
add_motor_raw(AP_MOTORS_MOT_7, -0.599, -0.804, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 7);
add_motor_raw(AP_MOTORS_MOT_8, -0.934, -0.298, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 8);
add_motor_raw(AP_MOTORS_MOT_9, -0.934, 0.318, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 9);
add_motor_raw(AP_MOTORS_MOT_10, -0.57, 0.808, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 10);
This is a video of my frame design 
“https://photos.app.goo.gl/LmWS5DPEhGxYvSZS8”
Running on 9inch props is it right ???
Thank you
looks good, now do a github pull request with your changes.
Means ?
I don’t understand what you tell me
But sir I’m not regular to read all posts also I don’t have enough time to get into whole thing
Because online classes is make a full shit ,…
So sorry I can’t do it , if you do so plz pick up it and do it
Thank you
The documentation is not that long - I would try to go through it yourself so you know how to do it in the future.
")
The video gives full instructions for what to change in the code.
In your video you have 6 clockwise motors and 4 counter-clockwise, that will not work.
No sir I’m just checking at that time , and sir some time motor not adding in page + motor not reverse or forward in aero key “some time” but when vpn is on then no problem ![]()
And sir
Is it ok ???
Huge huge Thank you sir for making easier code maker ![]()
Unrelated, but, big fan of your videos. Staying patient for the next upload!
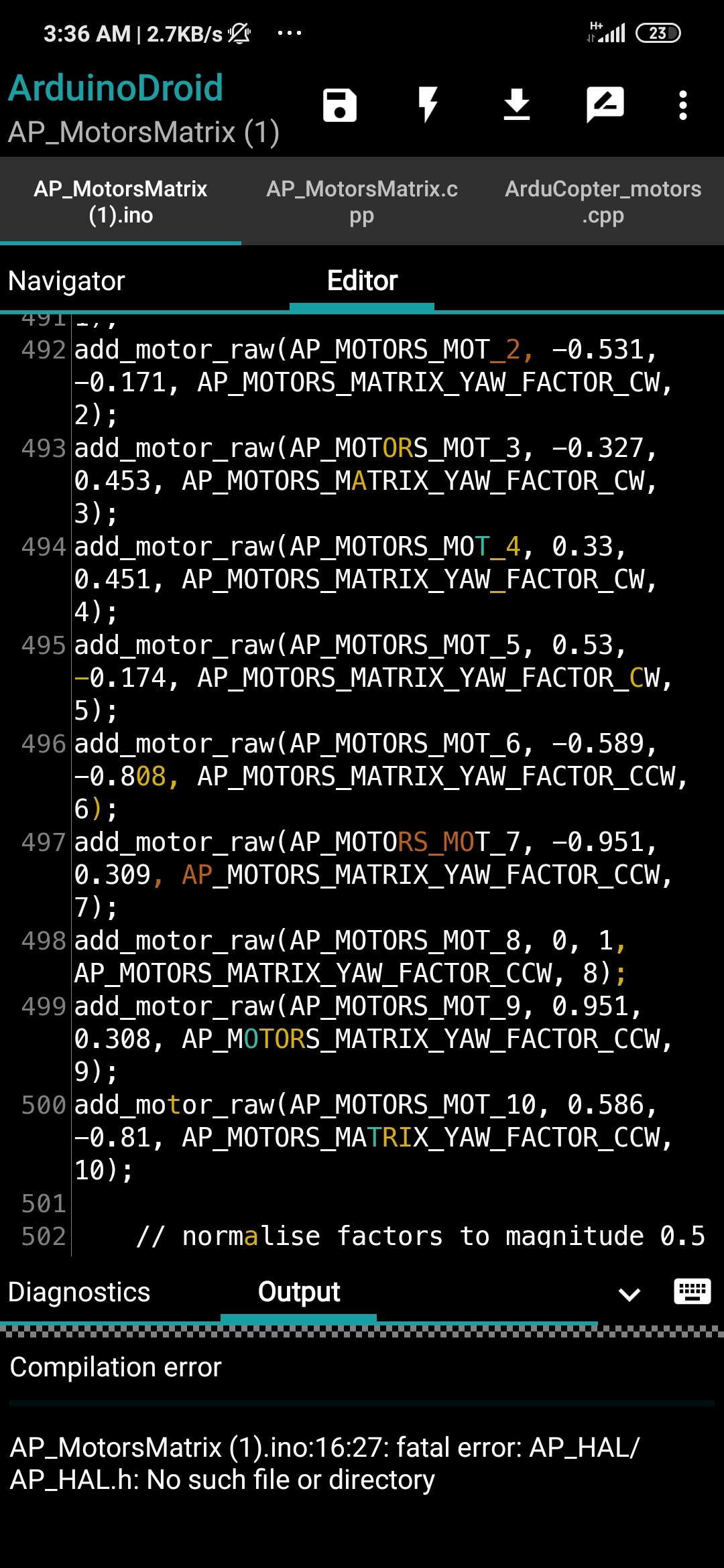
Sir I’m on my way but there is some problem , AP_HAL.h library file i couldn’t find it anywhere what can I do ? Plz help me I’m just 20% behind my destination.
Thank you
This has nothing to do with Arduino, and I think trying to build Ardupilot on your phone is not going to work out very well. Please read the instructions that I linked you to before: https://ardupilot.org/dev/docs/building-the-code.html
Things will be much easier if you use Linux.
Sir I think this is available 
See this thread , now ardupilot support decacopter.
Thank you