Hi all!
As title says, my plane (MFE Believer) makes a death roll after arriving home. Everything works fine in manual, and in FBWA modes, but when testing the RTH, it goes in the correct direction, but when passing over the home coordinates it starts rolling (made the same 2 times). Dont know the reason, hope anybody can check the log and give me a hint…
compass seems OK
gps seems OK
gyro calibration seems OK
hardware also seems OK
things that are new for me and may be causing troubles: VTail & differential throttle.
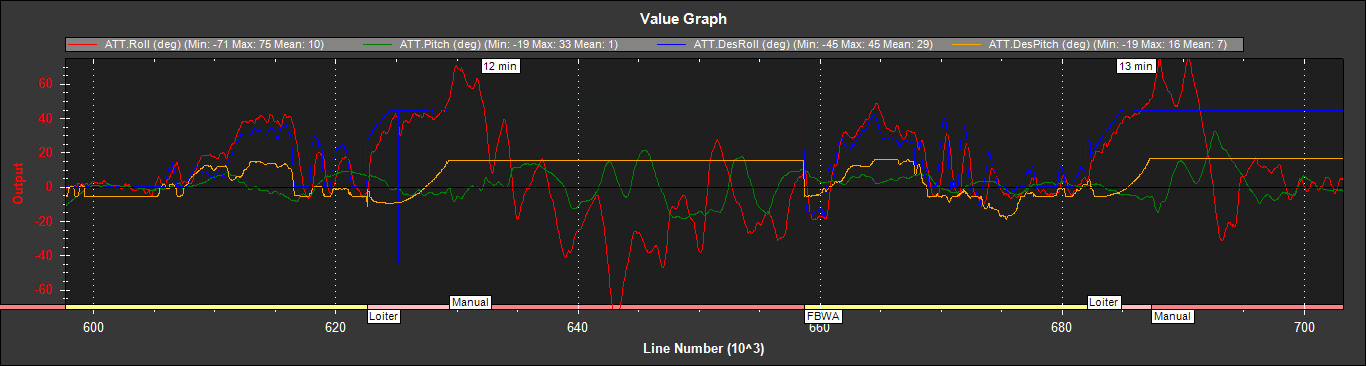
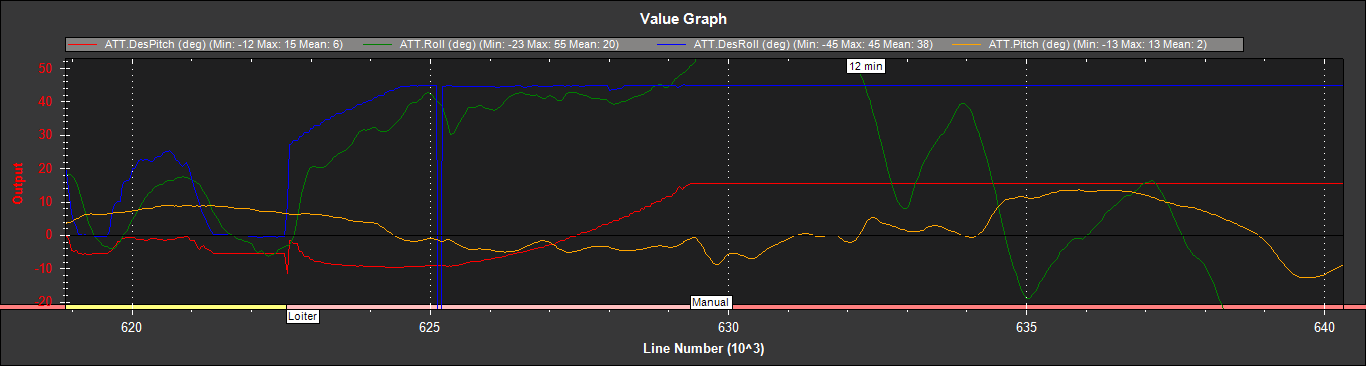
The problem is the plane is extremely badly tuned. You can see it in FBWA mode, it doesn’t manage to hold the demanded roll at all.
What have you done to tune the roll and pitch gains? Have you used AUTOTUNE?
Or maybe you should discuss with someone else who has the same airframe and has tuned it already?
Hum, quite strange… The plane flew fine in FBWA, didn’t find any issue with that, and we did autotune, 12 iterations in each axis…
Will try to autotune again, with more iterations, and report back, hope is as easy to solve, but I’m quite sceptic, since it flew fine in FBWA…
i’m back @tridge! few days ago I repeated the tests, and ended with the same results.
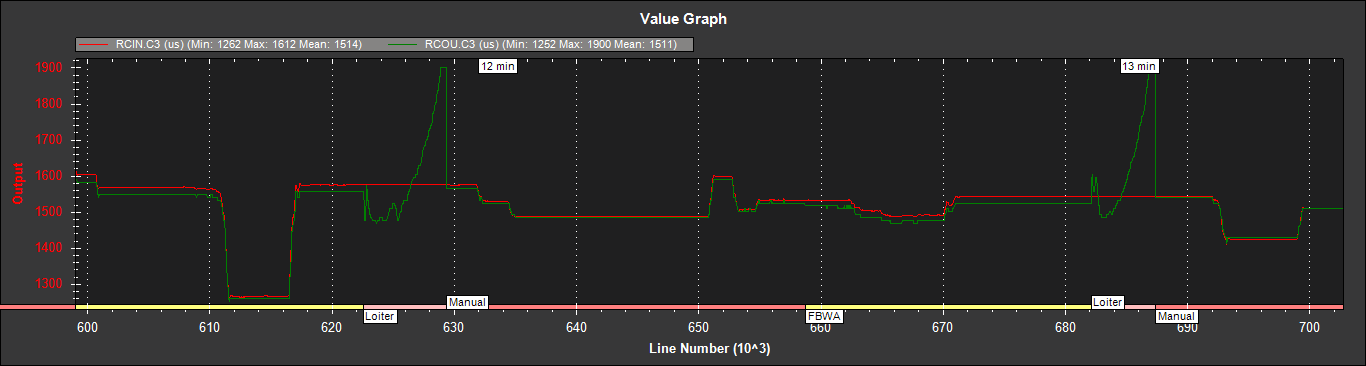
The plane flies OK in FBWA, and it starts LOITER also OK, but after a few seconds it throttles to 100% and starts the barrel roll.
Hardware (servos, control surfaces, etc) looks ok.
It flies well in FBWA mode.
AUTOTUNE has been made with more than 20 iterations for each axis.
hope we can find the problem!
thank you all in advance!
Here is the situation, the plane flyes good in manual and in stabilized modes. I made a short autotune (a full autotune was made in the flights before) and then we change flight mode to Loiter, since we found in the previous RTH that it makes the “death roll” when starting the loiter of the RTH.
We don’t allow the plane to do the full death roll, we change to manual when we hear that it is accelerating to 100%. But if we don’t stop it it would accelerate to 100% and start rolling right until it’s upside down (that was made 2 times in previous flights).
So, I cant find the reason that causes the plane to accelerate to the max and start rolling. maybe you could have a look?
And here are the atachements: https://we.tl/t-4aeGVGIXmq