I am assuming a Pixhawk 2.1 and kit setups here and not the 2.0. The 2.0 has a known issue where the board the IMU is on sees high G loads and is prone to mechanical failure. There is also questionable isolation.
A: Harmonics of the foam damped board. The frequency would depend on the elastic modulus of the foam. This will tell you the wave speed. Worst mode shape would probably be in a normal direction to the surface of the board when the wave is in a stacked wave based on the compression of the foam. (board is moving up and down at the same frequency as the natural frequency of the foam)
There could be harmonics in the carrier board if it is not attached to the box well. They would probably be trampoline shaped.
-Only screwed in the corners.
-No support features where plastic presses on the board from the top or bottom.
If the carrier board box is not mounted well there will be vibrations put into the system
-I would mount it with 2-3 pieces of 3M VHB tape to a solid surface on the quad. The VHB tape won’t come unstuck and will damp high frequency vibrations from entering the system. One piece could cause it to sea saw which would introduce unwanted values into the system.
-If the box is loosely zip tied or loosely screwed, the play could saturate accelerometers and gyros when the props are at certain speeds and lead to irregular bouts of instability from sensors seeing too much noise.
Effects of vibration can be either mechanical where mechanical failure would occur. electrical or data driven.
Mechanical: Chip solder connection breaking or wires breaking loose
Electrical phenomena could occur (induced currents in wires from vibrating in a magnetic field)
Data issues could come from noise on accelerometers and gyros leading to larger damping values being required in PID control. Uncontrolled harmonics could overwhelm accelerometers and lead to a condition where the IMU does not know which way is up. This could lead to unstable flight either all the time or when props are at certian RPMs. The instability could cause a condition where variations in prop RPMs introduce noise at critical times which could lead to a crash.
Vibrations could lead to high noise conditions on altimeters where a resonant cavity condition occurs inside the UAS body or the altimeter could become a resonant cavity from it vibrating and give wild pressure readings. This would give errant altitude readings and could bring a UAS down.
Measuring resonant frequency:
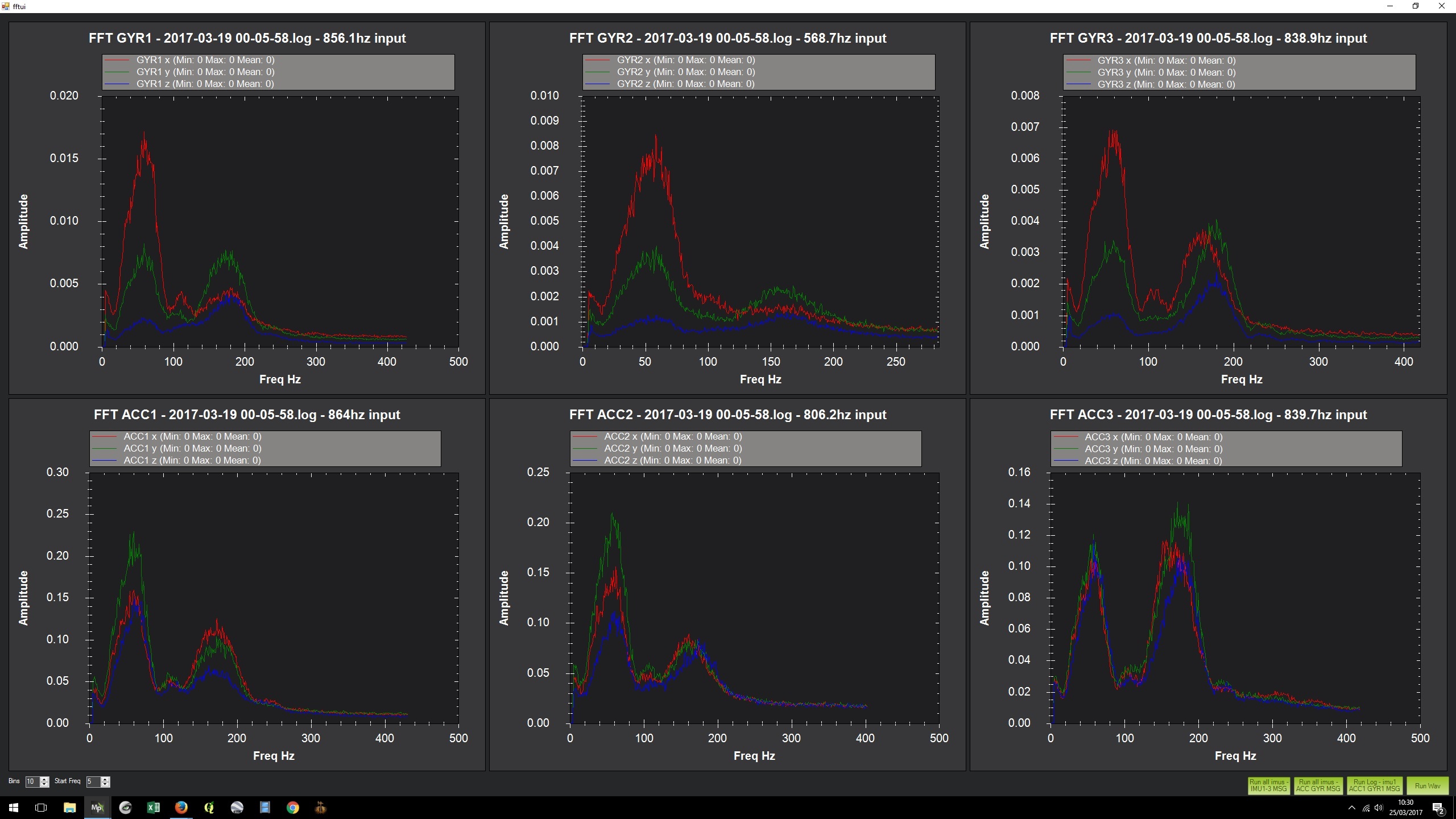
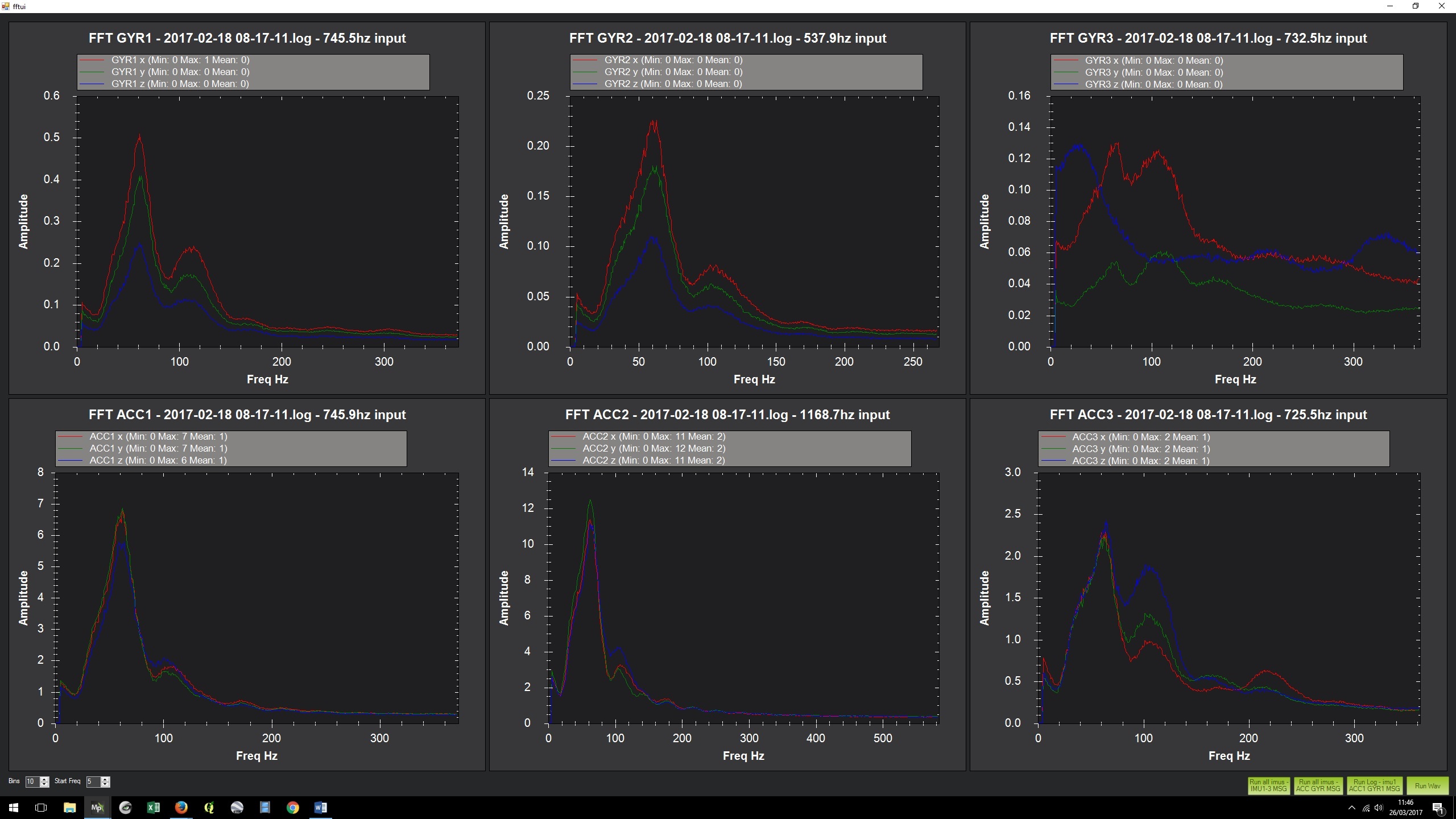
There are standard equations for beams and other shapes available. You could use mission planner and have it log vibrations with high resolution. You could place an accelerometer hooked to an osciloscope and do a tap test where you flick or tap the part and see what its natural frequency is. Whatever you do, know that stable sensors are happy sensors.
If your airframe has vibration and you want to lower the amplitude: If it is a low frequency < 50 Hz it is best to use some sort of stiffening to increase the resonant frequency. Get creative with 3M VHB tape and carbon fiber sheets or paint stir sticks to stiffen the structure.
If the frequency is over 50 hz or so use sorbothane or some sort of low durometer rubber to damp out the vibrations. Stopping high frequency vibrations from entering the system is the easiest way to fight them. VHB tape to attach components is pretty good at damping out high frequency vibrations.
The key here is for low frequency, stiffness is required and for high frequency damping is needed. If you want to read more on this look up rayleigh damping. High frequency vibration needs a lower amplitude to overwhelm a sensor as the accelerations produced by a high frequency vibration are higher than that of a lower frequency vibration.
An issue here is that most people lack the mechanical engineering background to engineer out vibrations. Trial and error will get you a long way if you know what to watch out for and do sufficient tests prior to flight. Basically cantilevers are bad and sensors should be mounted on a stable platform so they don’t get noisy signals. If you have a large board mounted to something, use more than 4 screws in the corners and try to get one in the middle. If you have a rectangular board you are mounting, try and secure it slightly off from the middle so you don’t get a M shaped vibration. 2/3 along the way is a good place.
Silicone caulk (The bathroom kind that is 100% silicone works pretty well for damping and filling things) It also should have a good dielectric so it is not conductive after it dries. It can get pretty messy if you ever need to get access to components at a later date. Best for if you are never going to need access to something again. If you need to ever get access again use sorbothane or a different low durometer silicone based rubber.
Other tips
If you have any sort of mechanical play on a sensor that is mounted i.e. an accelerometer that is zip tied down loosely, you will get lots of noise in the sensor reading and the autopilot may not be able to understand what the average value is if the extremes of the noise are past the max the sensor can read. This is a similar concept for a sensor mounted to a surface that can vibrate. If you can minimize the amplitude of movement, the readings will be better and the autopilot will not need to struggle to understand the reading. If you need to attach a sensor to the frame of your quadcopter know that the frame will vibrate with high frequency and you should use some 3M VHB tape to attach it so you don’t transfer the high frequency vibrations.
I would need better info on the cube to tell what the worst natural frequency is. The worst mode would probably be normal to the sensors that are mounted on the plate that is isolated with foam it would be in the direction that is normal to the surface in a vertical back and forth oscillation. Info I would need is the exact foam used, how the foam is attached to the cube. If the foam is glued on top. If the foam touches the sides of the cube when the lid is on. These things would let me calculate the natural frequency of the isolated assembly.
One other thing. Balance your props. Vibration from unbalanced props can be a large source of vibration. It is also easy to deal with.
Background: I’m a mechanical engineer and was a CAD designer through college. I spent a lot of time trying to understand displacement transmissibility.