Anyone who reads the thread…
2 Likes
Assume it’s still up for grabs…?
WOW! This is a GREAT thread. Has anyone NAILED down the best anti-vibration setup?
The best has been proven to be hard mounted…
1 Like
@proficnc I’d love to see some logs and videos from your hard mounted flight tests.
The best setup is the one where motor/props frequency when hovering do not match the natural frequency of the frame since the mount material available for the flight controller mount do not always allow to damp the vibrations of the system.
Its quite typical that the vibration is worst at hover when the motor/props frequency hits the frame natural frequency. However I have found out that with larger drones (18") in high speeds the turbulence caused by frame and thrust can cause high vibrations in the frame even when the motor/props are not rotating in the natural frequency.
Best way to avoid that is to make the frame more stiffer so it wont flex even on high forces caused by low/high pressure changes.
Thank you. My S1000 airframe is “pretty stiff” but could probably use some stiffening. Currently, I do not have the PH 2.1 on a dampened frame/board, but might have to try it also.
In my experience when there is excessive vibration it causes even more problems as the dampening system can start oscillate too and it adds phase delay to the wanted signal. For example I have seen that the pixhawk 2.1 undampened accelerometer can have lower vibrations compared the two dampened ones in cases where excessive vibrations are present.
It would be best to get the vibrations to near acceptable levels with structural changes before adding dampening. In my opinion the best case would be when minimal amount of added dampening is needed (the pixhawk 2.1 internal dampening is enough).
Hi,
I have tried gel cubes for vibration damping because I have problems with a tarot frame in another thread: PH2 direct mounted vibration clipping issue/question
I hope I did the FFT analysis the right way. When I click on “Run all imus - IMU1-3 MSG” nothing happens but when I click on “Run all imus - ACC GYR MSG” I got some graphs… Mission Planner 1.3.58.
BR,
Lorenz
“Clipping” by itself may or may not be an issue
Post pictures of your fft results
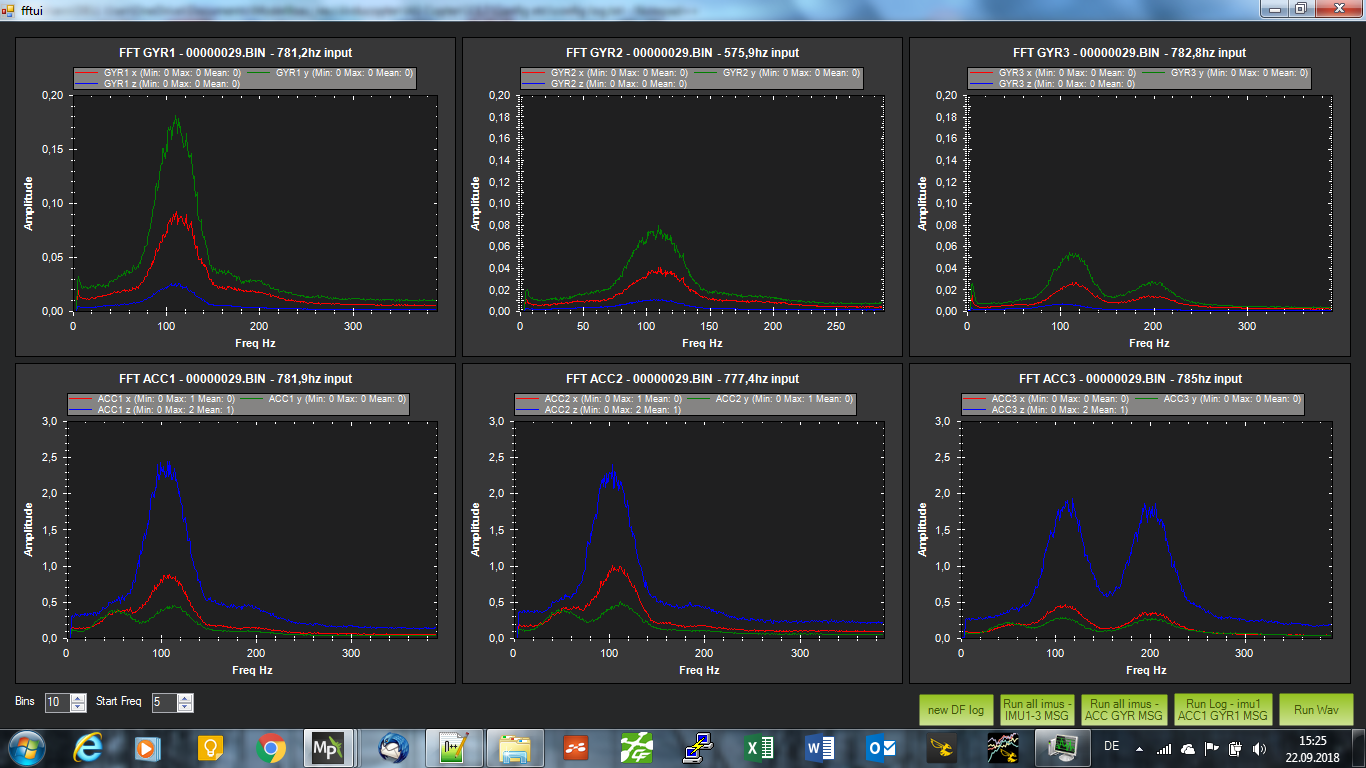
Here are my FFT results.
Flight 1: PH2 direct mounted on frame with autotuned PIDs and a lot of wind.
Flight 2: PH2 mounted with gel cubes and the PIDs from flight 1 - no wind
Flight 3: PH2 mounted with gel cubes and new PIDs with the gel-cube-mount
in my other thread there are also the vibration logs if somebody want to check them out. There are also the links for the corresponding log files.
I also noticed that if I load a log with all the IMU data, when I select “vibes” in the log window, no data is displayed. Only “Vibration 3.3” works.
Flight 1:
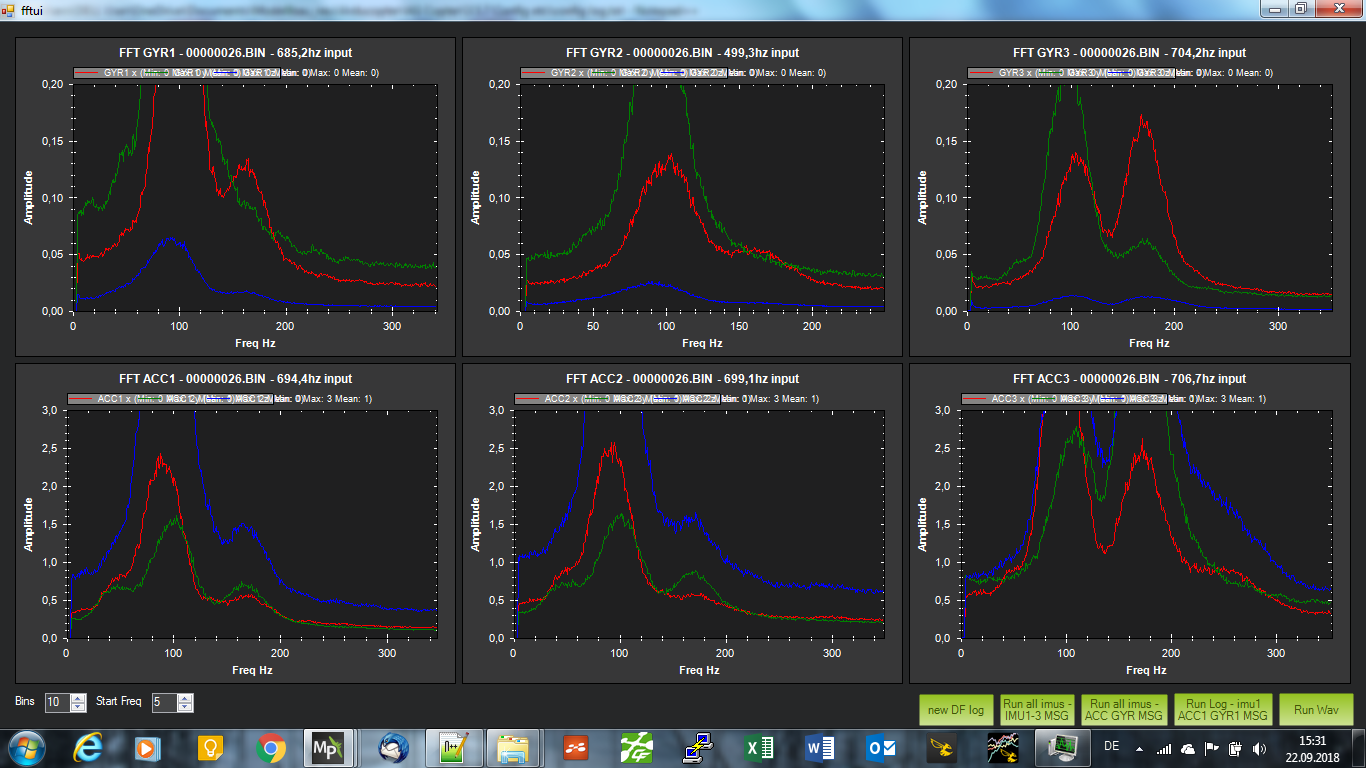
Flight 2:

Flight 3:
Maybe I am on the right path for vibration damping with my gel cubes. Otherwise I have to try the o-ring method…
Gel cube mount:


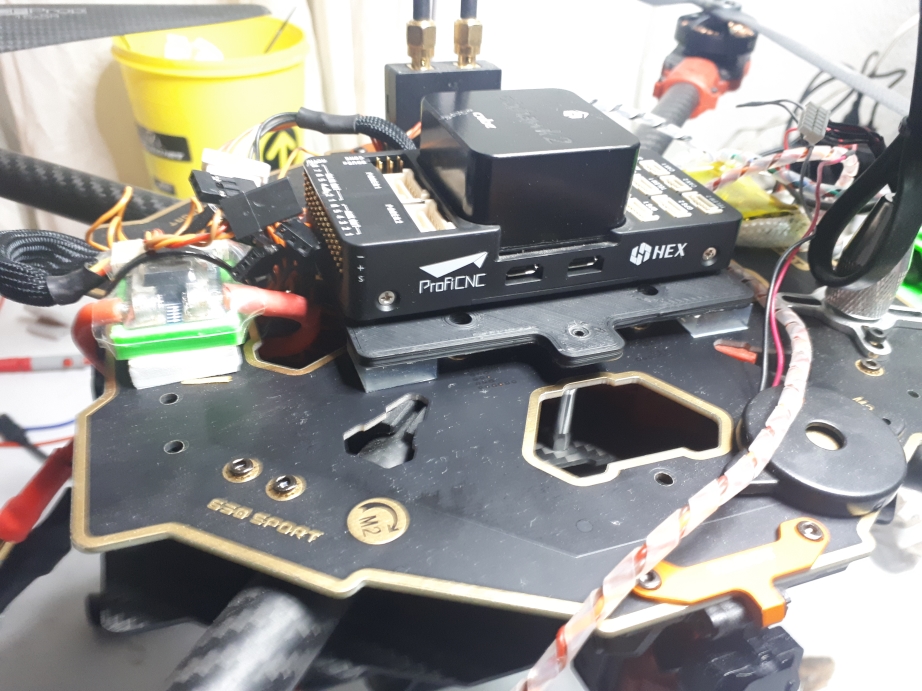
You need to fix the actual vibration on your copter
Get rid of the gel
2 Likes