@BRiskas I have not tried to hard mount the Cube by screwing it directly to the top plate. I realize that 2 of the 3 IMUs are internally damped and that adding another vibration damping device will affect the performance of the internal damping. I ran some tests with different vibration isolation methods with this type of flight controller in the past on a different vehicle (Coaxial Octocopter with 18 inch propellers) and had the best results with the Moongel when comparing it to some of the other commonly used vibration damping materials. So this was the reasoning for going with the Moongel off the bat for this vehicle.
I know I’ve read several posts debating whether or not the Pixhawk 2 should in fact use additional vibration damping. I don’t believe I’ve seen a consensus reached on this issue yet. I assume it will vary depending on the specific vehicle and the corresponding forcing frequency. It could be that one of these frequencies is excited on this vehicle. I’ll have to determine this conclusively with some more testing.
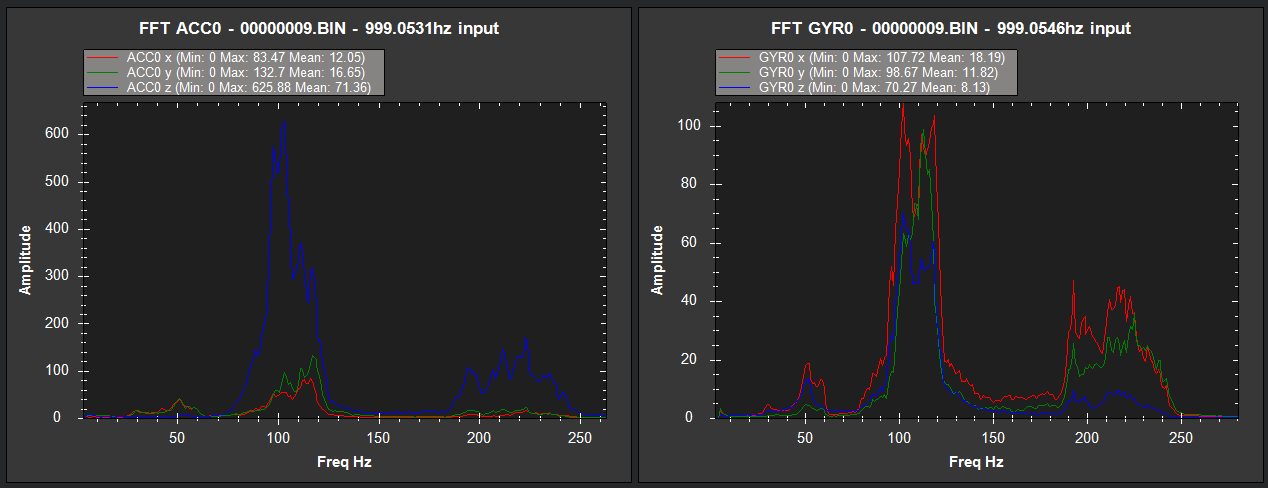
I ran an FFT for IMU0 on the next flight: https://drive.google.com/file/d/1f-hI2vqwX5wiO7y6tnl_QQ7NBGchSSdV/view?usp=sharing
The large spike at ~103 Hz is from the propellers (based on 2x our estimated RPM). There appears to be a harmonic above that in the low 200 Hz range. The other, smaller spike at 52 Hz concerns me a bit more though because I don’t know what’s causing that. I suppose it could be induced from the wires vibrating, or from another frequency being excited… (Correct me if I’m wrong) I’ve read the post here discussing the natural frequency of the Pixhawk 2 here: Dealing with Vibrations and harmonics... a competition
Thanks for the suggestion!
https://drive.google.com/file/d/1f-hI2vqwX5wiO7y6tnl_QQ7NBGchSSdV/view?usp=sharing