hello,
Can somebody help me to find out the cause for ardupilot not storing the data in flash log for certain period. I am trying to solve stability issues for this flight. Details of flight and observations-
- Firmware : Arduplane 3.5.2
- Flight incidents: Flight was meant to tune for pitch and roll. We started with tuning of pitch using AUTOTUNE mode. Then, we saw that canopy of plane came off. So, we thought of aborting the flight in course of pitch tuning. Then suddenly flight went to AUTO mode unintentionally. We saw it is loosing control and in companion laptop we have watched it continuously in AUTO mode. Then we thought of taking over the control changing mode to FBWA. But, by the time it already lost the control and we could not get the control on it. Finally, it smashed in ground.
- Observations :
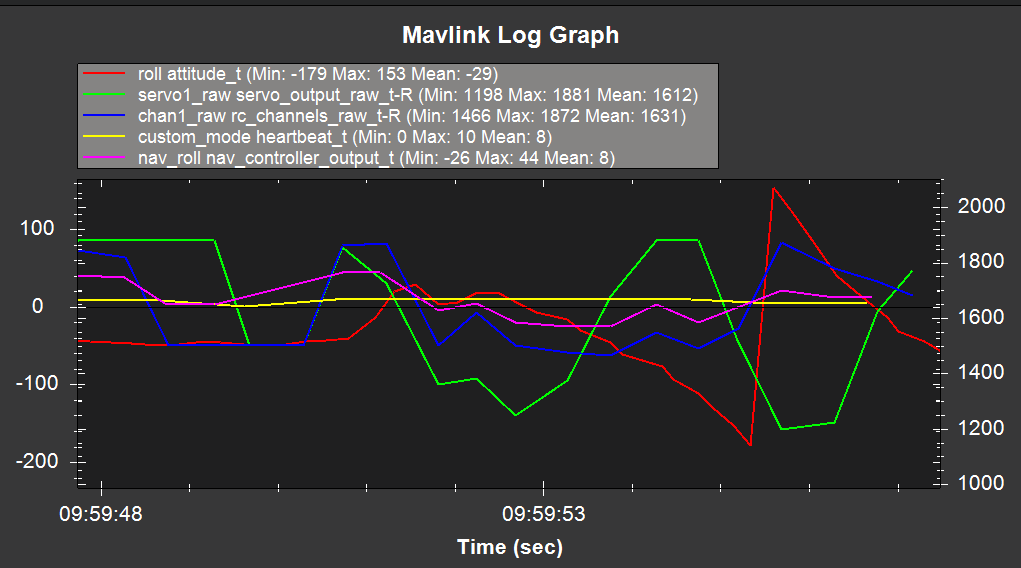
a) We never changed our mode to AUTO from AUTOTUNE using transmitter. But still we saw the flight ground station was getting a message that flight is in AUTO mode. It can be inferred from custom_mode_mavlink_heartbeat_t parameter in tlog. But in log file MODE message show only one message. It might have failed to store other mode changes.
b) Flash log for certain time has failed to log the messages for variables. This you can see plotting any data like sensor values or attitude values, for which some data are missing in log.
c) Flight went to roll tuning after mode change message from AUTOTUNE to AUTO came. This we can verify seeing ATRP variables (this stores the autotune variable in process of autotuning and its corresponding type, state, p values, servo, achieved and demanded values). The type field of this message says which autotune process is going on (0: roll, 1: pitch). In this particular case we went for pitch tuning. But, suddenly the log says the flight has gone for roll tuning. After that we have checked whether the mode change has happened or not using custom_mode_mavlink_heartbeat_t message logging time. Then, we found out that certainly it has happened. The flight has gone to AUTO mode before that. How much unlikely the case is that when ARDUPLANE mode changed from AUTOTUNE to AUTO (which is again not done by pilot), the ATRP variables have changed or gone for roll tuning from pitch tuning? Or this is like a normal process when mode change happens?
d) Pitch tuned P value stored in P value. Ardupilot automatically saves these parameters in during autotuning process after each 10 seconds and stores the value 10 seconds earlier. Since, the overall flight time for AUTOTUNE mode was more than 10s, so definitely it has saved pitch tuning parameters. We have seen in ATRP message P value going to 2.0216 starting from 0.8 and ‘PTCH2SRV_P’ value in PARM message has the same value of 2.0216. This is perfectly fine behaviour of storing the value. But still this value is little bit in higher side it seems. So is there any chance that this parameter can make the flight unstable, since we have stopped the tuning process in this higher value of P.
Can somebody help me for debugging this log? I am attaching log and tlog files with it.
https://drive.google.com/open?id=0Bw-bcC5rtu3KX3FIWVFEYVZJZ2c
https://drive.google.com/open?id=0Bw-bcC5rtu3KQVFuck9pUmVtTG8