Hi Fam, I’am. using custom quad frame with pixhawk 2.4.8, these motors, these ESCs, and 1045 props.
While taking off in Stabilize mode, as I start with the thrust the quad starts yawing to the right and doesn’t take a balanced liftoff. Tried calibrating the ESCs, GPS but nothing works.
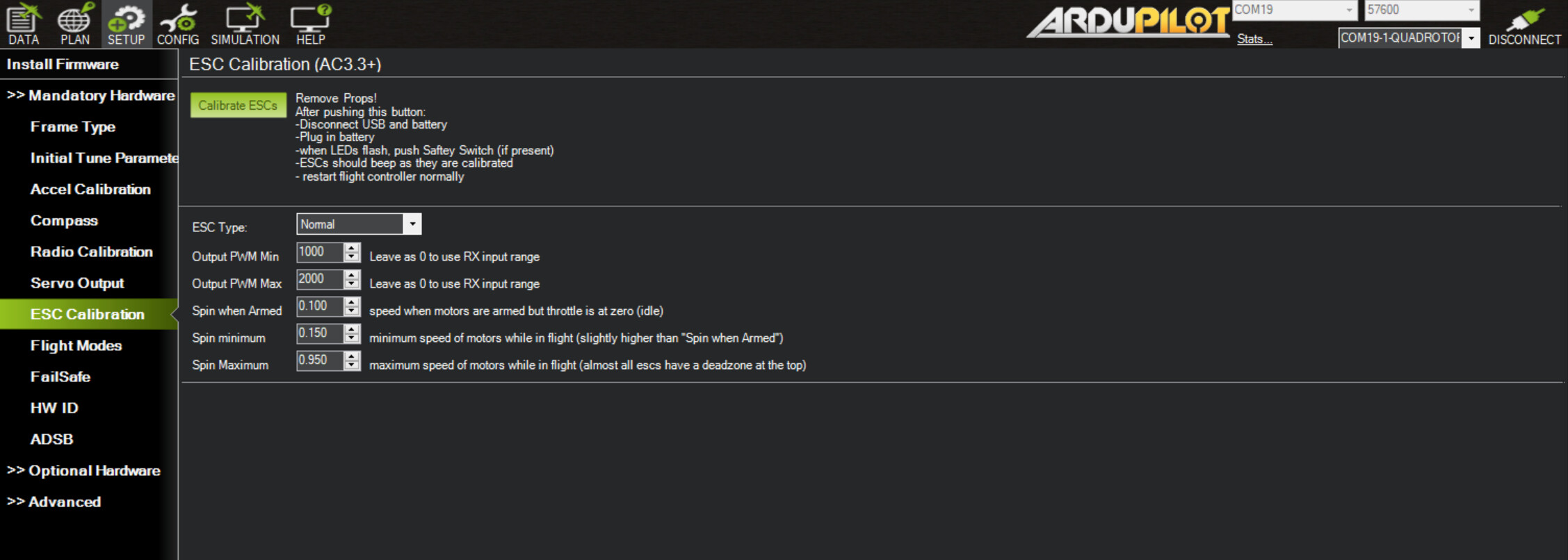
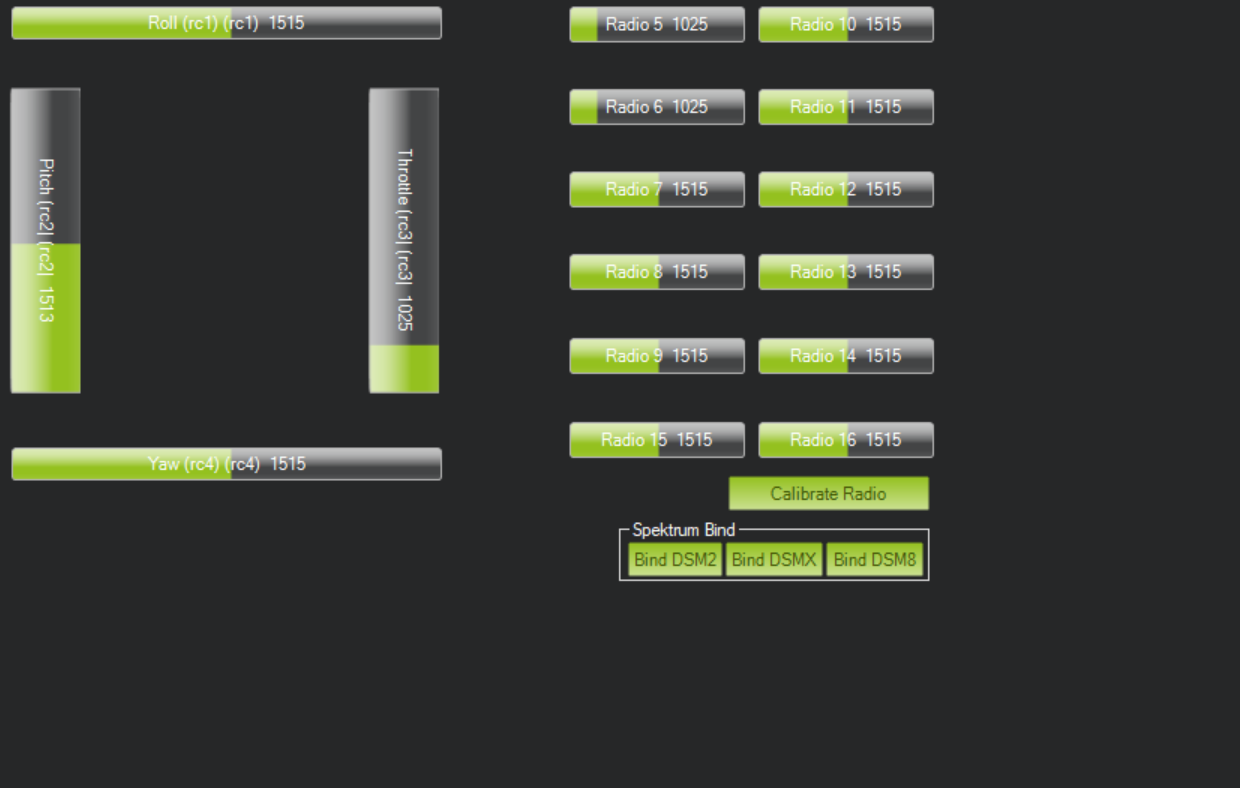
Lemme know what I am missing. Have attached few screenshots.