Hi all,
I’ve installed a Mauch 100A current sensor in my drone, as well as a FrSky voltage sensor that runs off the balance lead of the 4s battery I am using. Curiously I am only getting power data from the #2 Power Input port on the Pixhawk board. I’ve historically only used the #1 Power input port, and have always been getting ‘check baord voltage’ warnings when trying to arm, and no voltage or current readings.
After battling with this, I tried the #2 Power Input and now get some data.
First question:
Regarding the voltage calibration. I used the V divider and A/V as supplied by Much, but this resulted in both mV and mA readings, which aren’t correct. I then followed Randy’s video online (https://www.youtube.com/watch?v=tEA0Or-1n18) and, using the measured voltage from the FrSky monitor, got a different V divider, and very spiky inconsistent voltage data on the dashboard and through the status telemetry:
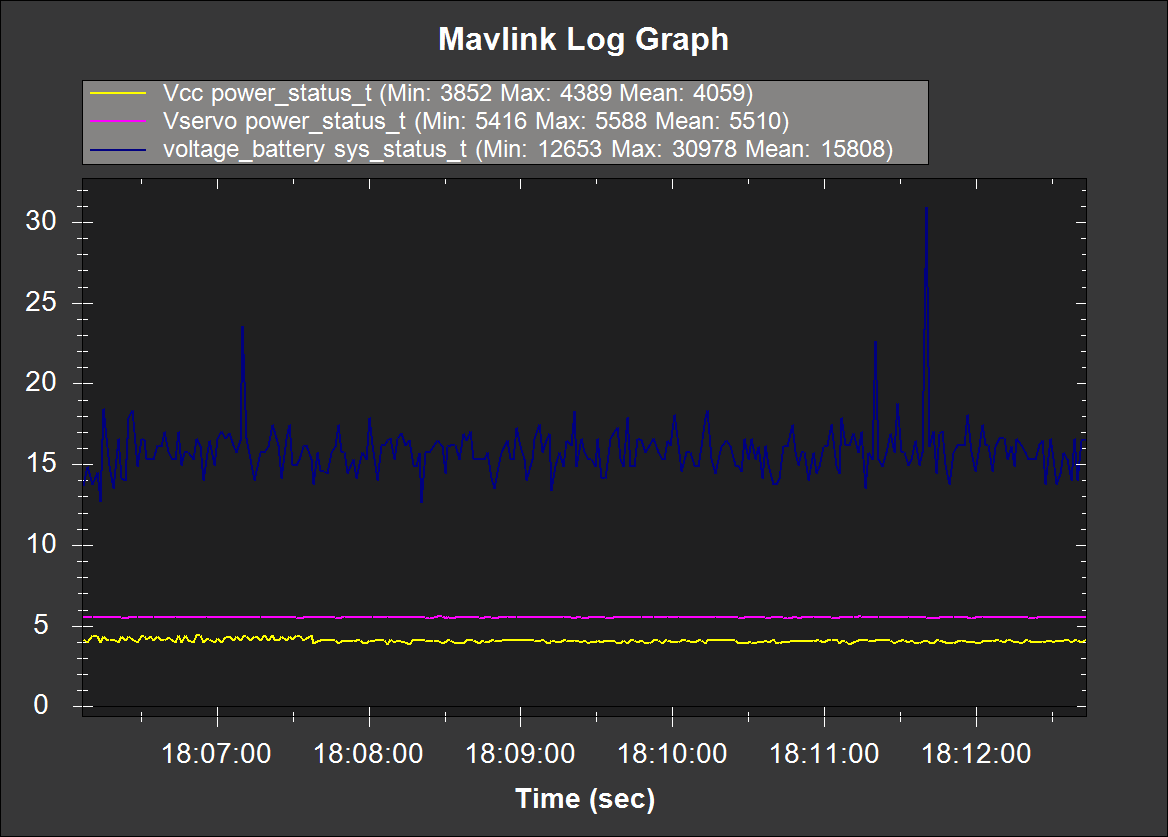
The battery voltage is a consistent 15.86V, yet the Pixhawk telemetry is all over the place.
Second question:
I also checked the board voltage and the servo voltage, but I have no idea what these should be. 5V for the servo seems good. but perhaps the board voltage should be higher than 4V?
Third question:
Regarding the current sensor - I don’t yet have a Power analyzer to check the current - which prevents me from completing the current calibration. But it is strange that when I use the values for V div and A/V supplied by Mauch, the values are so low.
Any advice would be greatly appreciated!!
Chris.