@xfacta sorry for taking long time here to update.
i have decided the to do same test on another new set of cube orange+ on different drone but similar type drone.
this time i have mounted with less thickness foam tape which come with cube orange+ boxes . Last time you mentioned the issue may be with large foam tape. Images attached below.
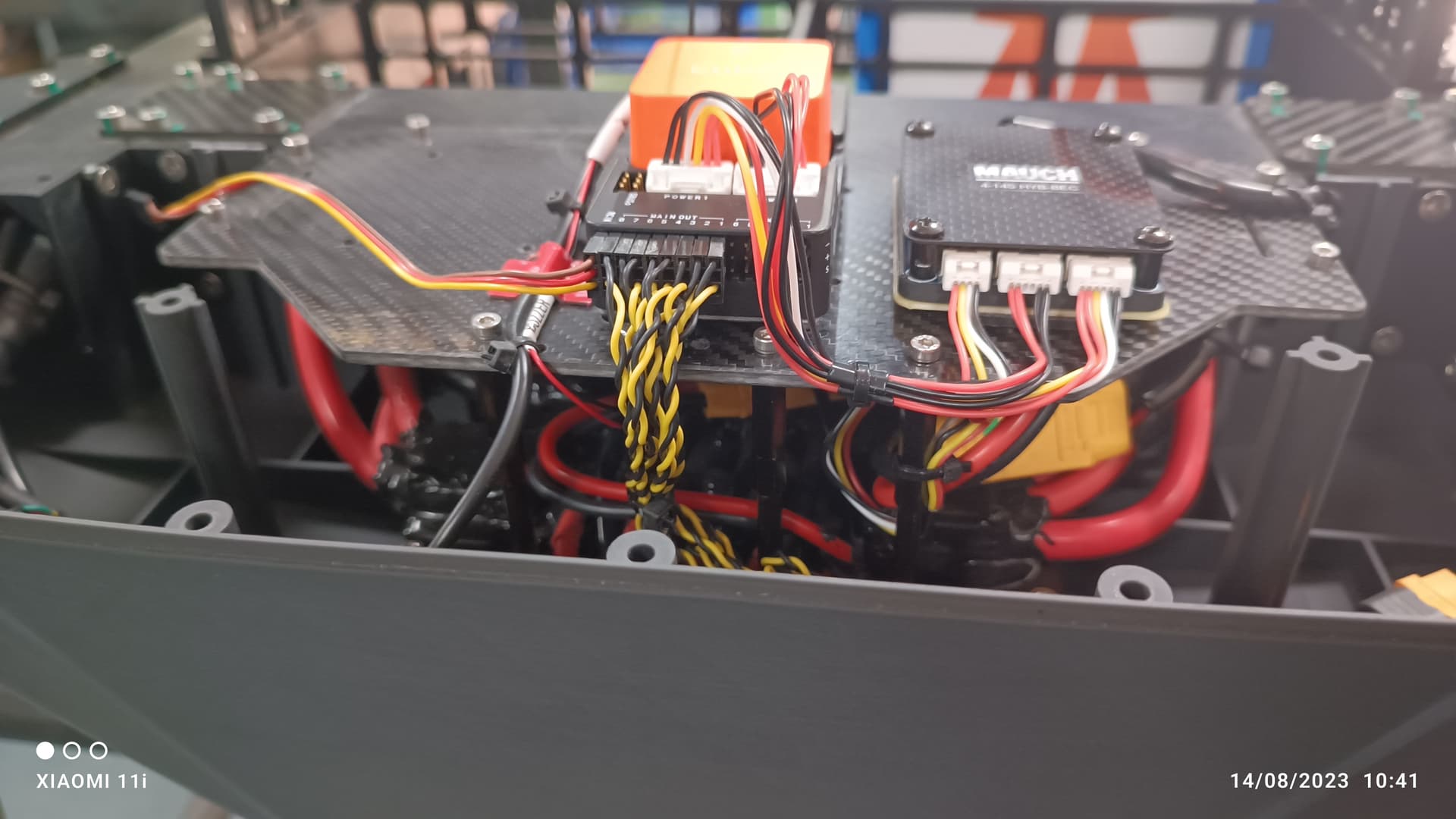
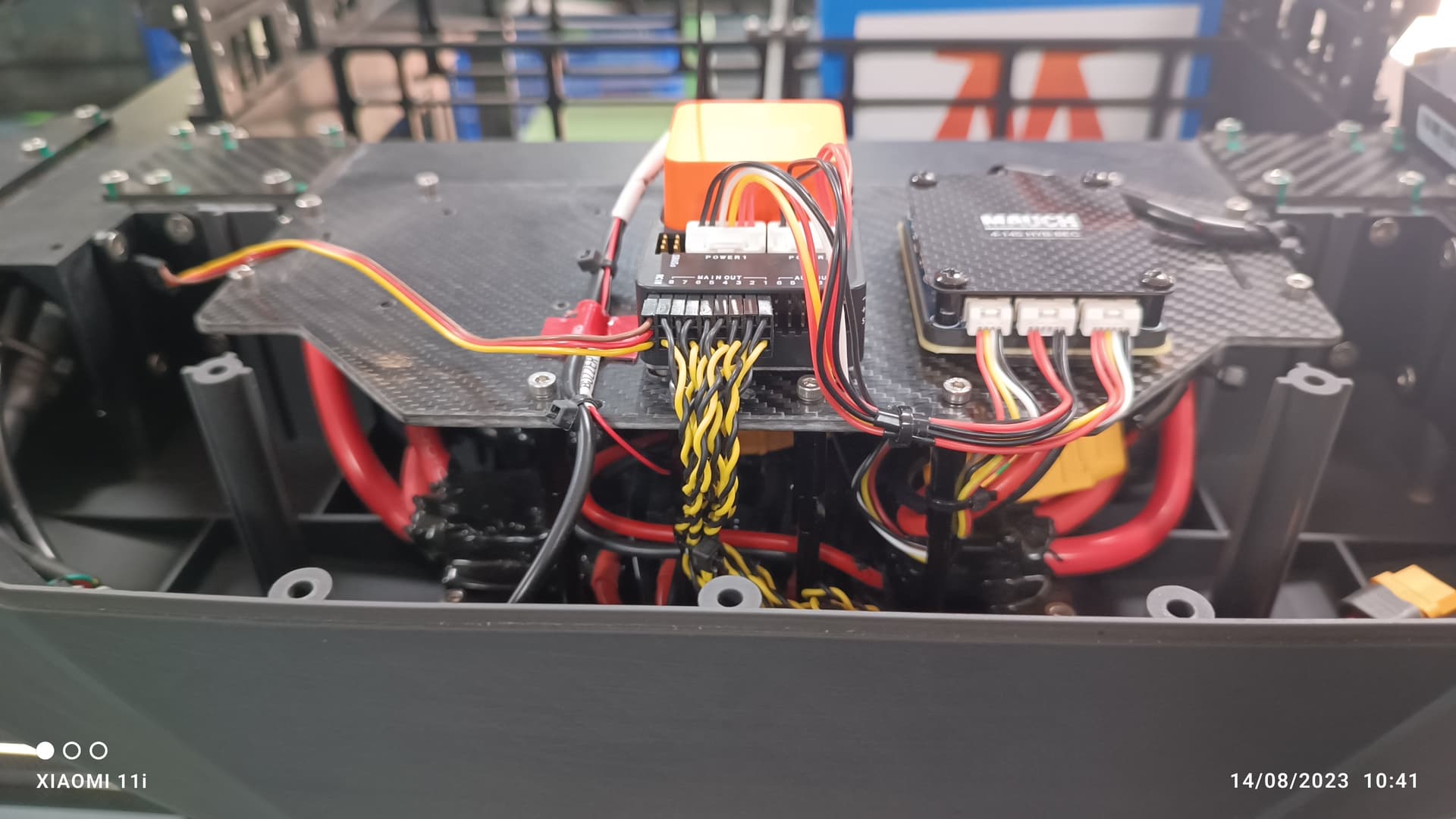
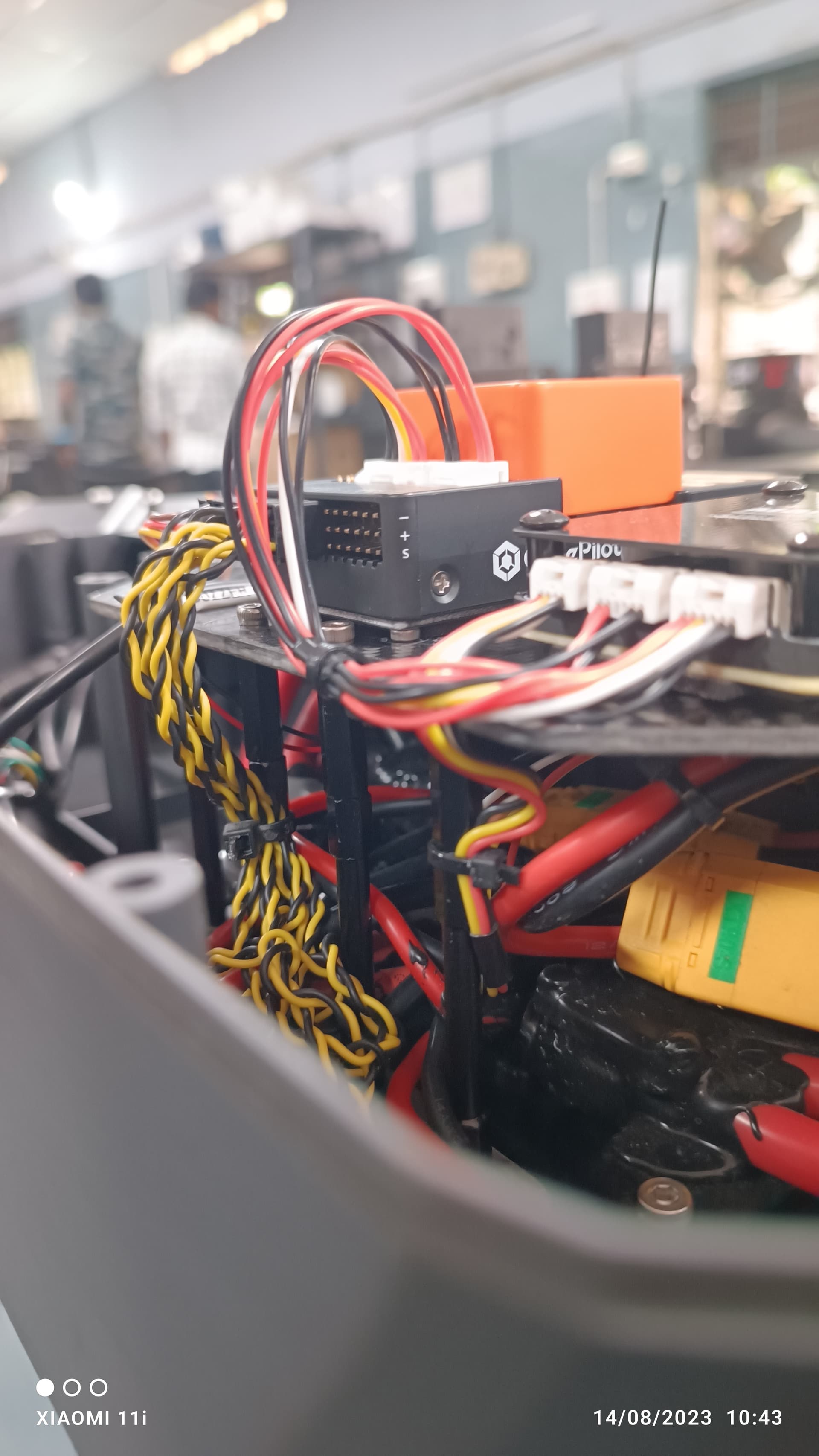
You can notice in the image i have added 4 spacers to stiff the autopilot carbon fiber plate with airframe. this i did not done this on previous airframe.
today i had test flight with all initial parameters loaded and noticed that Z axis vibration is very much improved compared to last time .
last time IMU0 and IMU1(isolated IMUs) goes more than 90m/s/s with more clippings on both IMUs . please refer in this topic for last Vibration Level.
Today both Isolated IMUs goes only 40m/s/s Max even we flown upto 15m/s speed in stabilize as well as Guided mode. as shown in the image below.
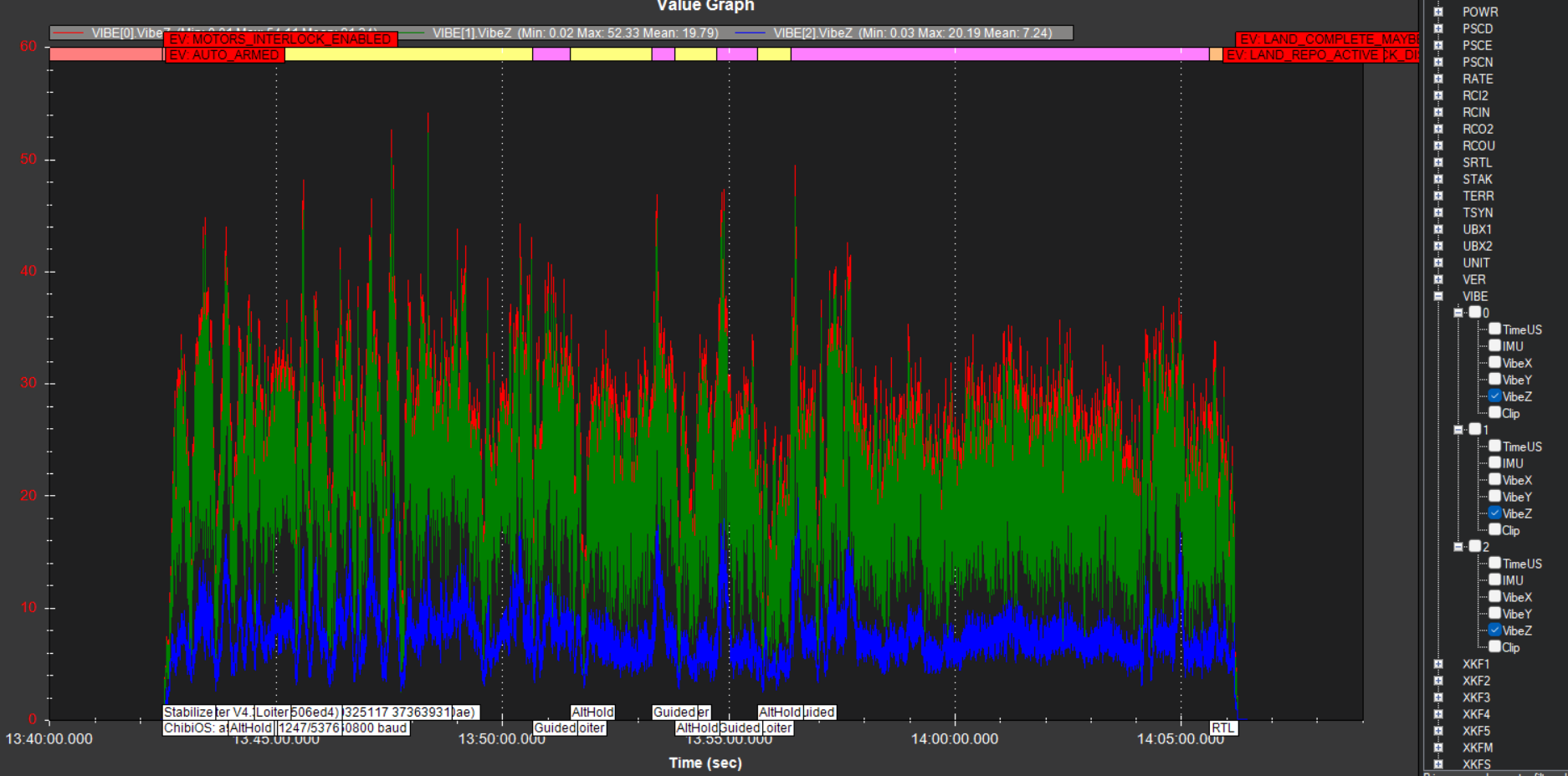

Here you can notice that still Non-Isolated IMU (IMU2) is very less vibration when compared other 2 IMUs.
I have configured the Notch filter too and attached logs with all Pre and Post filter Logs.
https://drive.google.com/drive/folders/1tPa-4MmT5pvLS-xJeIaOEmP6Dk8fIL3a?usp=sharing