There are already many topics that deal with this. And yet I have not yet been able to get it to work.
I am currently working on a rover project. It has 4 rigid wheels which are individually driven by a motor (skid steering).
As hardware I use a Cube Orange and 3 ardusimple simpleRTKB budget boards.
I use one board as a base station. This transmits the corrections via XBee to a second board on the rover (GPS1; moving base). The third board is also on the rover (GPS2; rover).
My goal is GPS_YAW. Unfortunately, I could not create a configuration that worked for me.
I have used the following instructions as a guide. (Post 38)
Maybe someone can see from the parameter file what the problem is and help me with it?
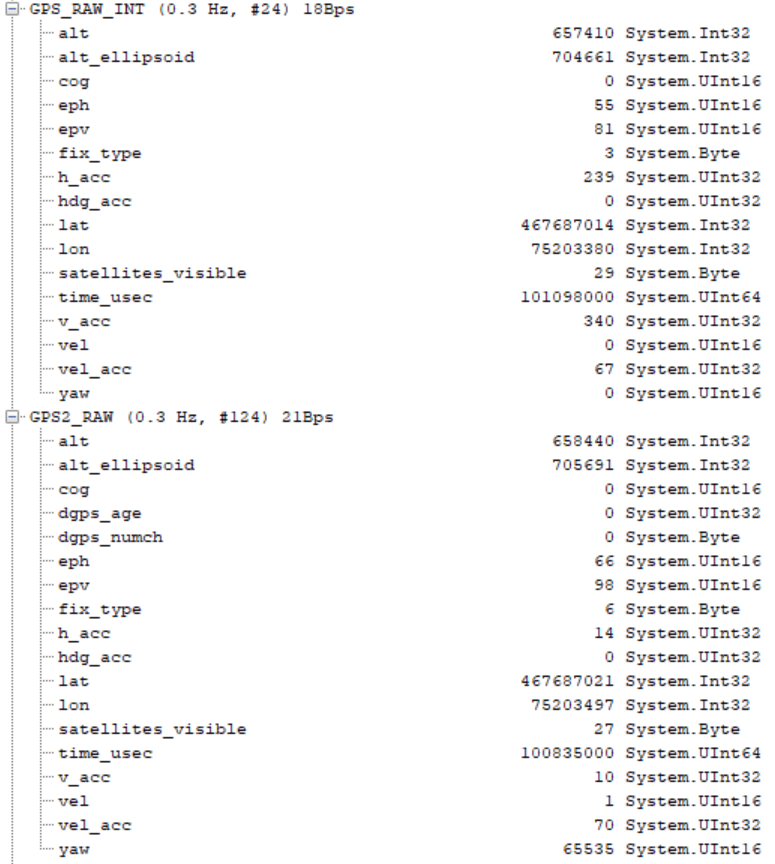
According to my research, the value 65535 means that GPS_YAW works, but does not output a meaningful value.
The distance between my two antennas is 60cm. GPS_YAW.param (15.5 KB)
Thank you @Yuri_Rage for your quick reply and also for many other contributions in this forum which support us in our project.
GPS_YAW works after I have set GPS_PRIMARY=1. This does not correspond to the documentation.
Now, if I set GPS_AUTO_CONFIG=1 and the XBee is not connected, there are no problems. The rover moves to waypoints in auto mode.
After saving the configuration with “GPS_SAVE_CFG=1” & “GPS_AUTO_CONFIG=1” I set both parameters back to zero. Then I set UBX → CFG → PRT and UART2 to 115200 and Protocol in to RTCM3. As described by you in the post mentioned above.
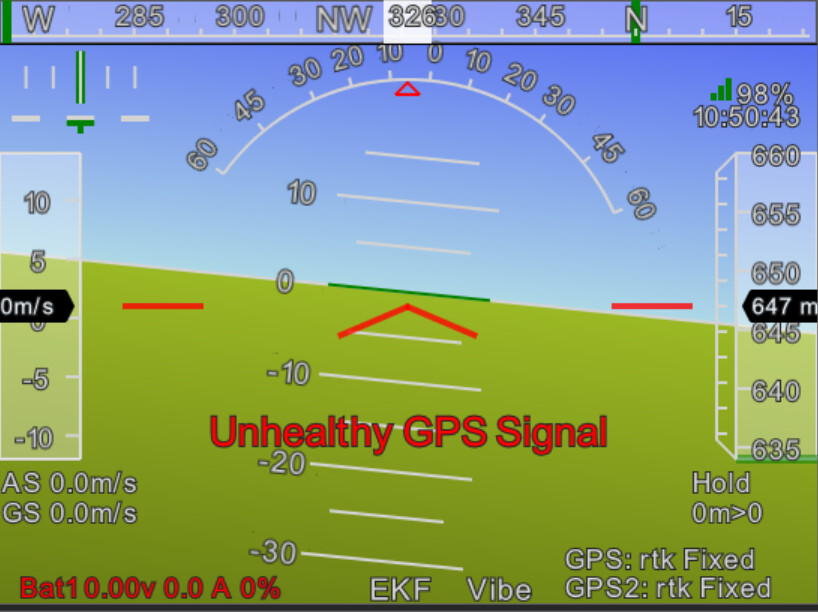
Now I get RTK Fix on both GPS and also the correct heading of GPS YAW.
However, I then get the message “Unhealthy GPS Signal”.
I mounted the antennas on the front and rear of the rover instead of the left and right to increase the distance and accuracy. HDOP GPS is 0.6. GPS_YAW_26.05.2024.txt (15.5 KB)
I again have set parameters and the wiring as described in the documentation. As you can see from the attached parameter file I use Serial 2(GPS1) and Serial 4(GPS2).
I set the parameters as follows:
GPS_AUTO_CONFIG = 1
GPS_PRIMARY = 0
GPS_TYPE = 17
GPS_TYPE2 = 18
In this case I would connect the XBee to GPS1.
Unfortunately, not even GPS_YAW works with these settings.
Here is the log file where you can also see the current parameters.
These parameters correspond to the description and allow RTK corrections via XBee and GPS YAW to be obtained within a few seconds.
The signal is reliable, even under trees the mission is continued.
I am currently waiting for 2 new motors from the manufacturer. As soon as they arrive I will continue with the tuning.