I’m using a Cube Orange Plus with two power sources. I have a Mauch sensor in Power 1 for power sensing and a Power Brick Mini in Power 2 for backup. I’d like to configure the system to use data only from the Power 1 module and have the Power 2 module act solely as a backup. I’m using Arducopter 4.3.7.
Any help or guidance on how to set up this configuration would be greatly appreciated. Thank you in advance!
Use the initial parameters calculator if you are unsure of anything.
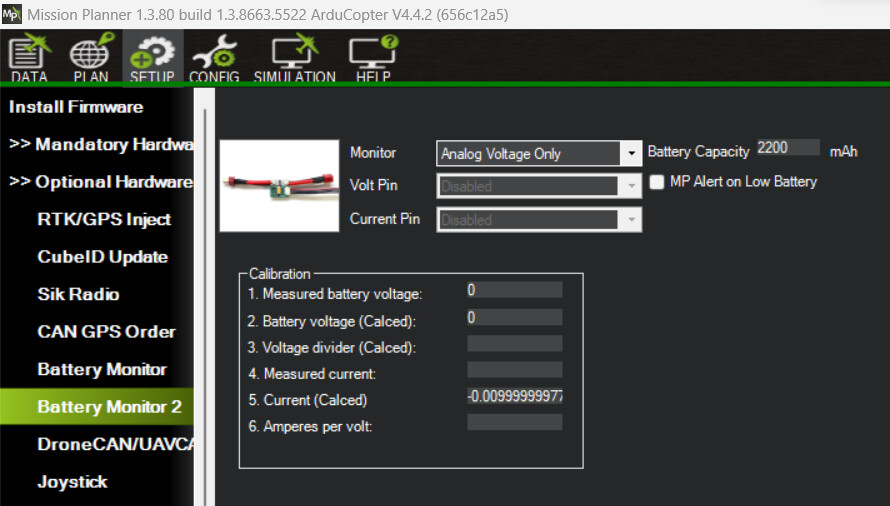
And in BATT2 the equivelant params should all be zeros - you will need to enter zero in BATT2_CAPACITY and BATT2_LOW_VOLT as they will have default values.
BATT2 voltages will be recorded in logs, but no actions taken.
EDIT:
In full parameter list check that you have
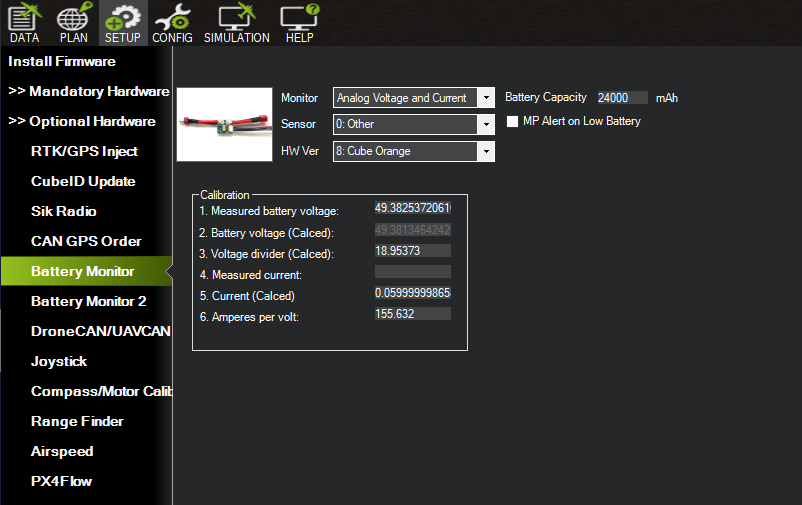
BATT_VOLT_PIN,14
BATT_CURR_PIN,15
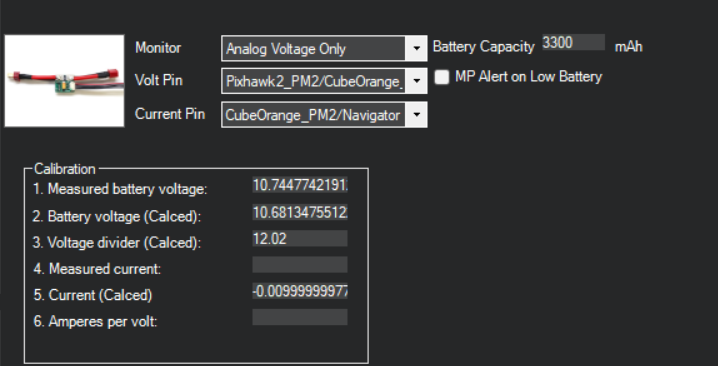
BATT2_CURR_PIN,4 (-1 for disabled)
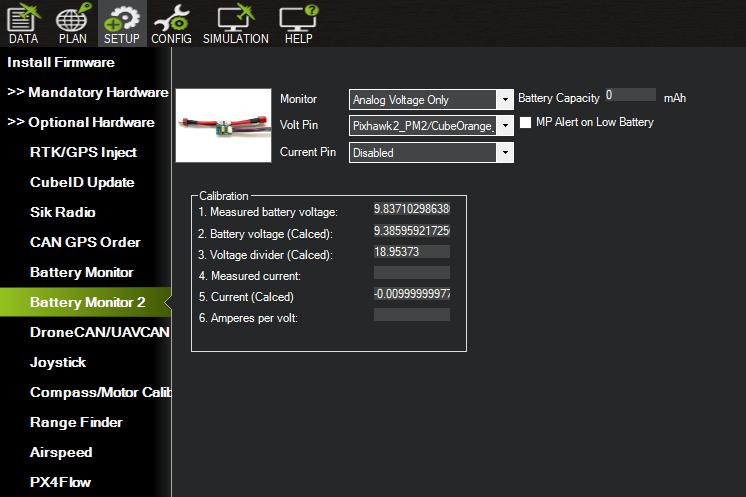
BATT2_VOLT_PIN,13
BATT2_VOLT_MULT,12.02
I adjusted the text and screenshots above to give these correct values after I tried it out on my Cube Orange (same as Cube Orange + for these)
I had started just using an old Pixhawk1 1M that I already had on the desk so it was a bit different.
I am having a similar issue. My Power1 voltage is correct but my Power2 is not and I have NO clue why at this point. If I move my Power1 connector to the Power2 connection, I get the correct voltage. Am I not configuring the Mauch sensor properly??? I am using the 031 PDB.
What are you connecting to the Power2 input? As far as I can see there is only one fully functional flight controller power output on the Mauch which has voltage and current sense wires.
If you are connecting one of the other +5v and GND outputs to Power2 then likely there is no voltage sense wire. You would just have to disable BATT2 monitor. The Cube will still have a redundant power supply and function as expected (provided the Mauch functions as expected) but it just wont be logging the battery voltage.
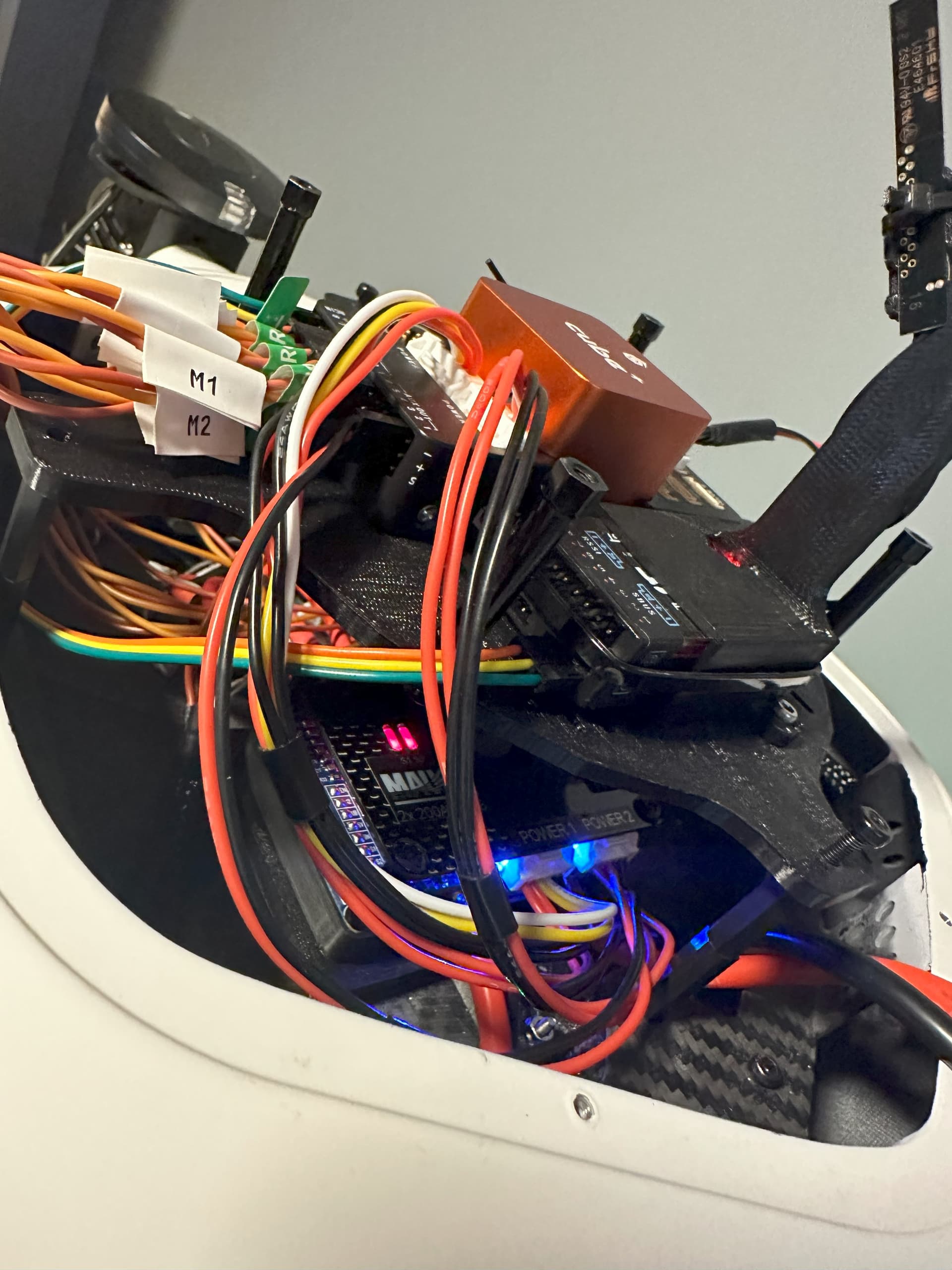
Thanks for replying! I have my main batteries connected on POWER1 then failsafe batteries (much smaller batteries I only want to use when landing the copter during a scenario where POWER1 loses voltage) on POWER2.
Here is a picture of how I currently have things wired up:
Yes, as I thought the connector to Power2 doesnt have the voltage and current sense wires, so you may as well disable the seconds battery monitor.
All your wiring will need to be secured to the frame and not putting any weight on the flight controller - as pictured those servo wires and power wires will be transferring vibrations to the FC.
Just something to keep in mind - Generally running second batteries as a backup is not such a good idea as it would first seem with a multirotor. There’s more complexity and a second set of everything = weight.
Most often it’s more effective to run everything off your main batteries and ensure they are in good condition. It pays to check the condition and tightness of connectors too.
Oh my, not sure why I was thinking the Aux connections from the Mauch to the FC played into the voltage readings . A little more background so that my use case makes a bit more sense, I am building a tethered drone with onboard power supplies so I am worried that, if there is something wrong with the power source on the ground (loose connector, un-plugged, circuit breaker trip, etc.) I want to have a small set of batteries to safely bring the drone down from its hover.
Can I use the alarm relays from the Mauch to trigger the failsafe so that the drone will begin landing? I struggle to find any good documentation on these PDBs. I am hoping there is some way to trigger Ardupilot to land when the MAUCH power input switches from POWER1 source to POWER2 source. This post seems somewhat indicative of that (How to utilize a Can or I2C port on Pixhawk 2.1 to alert me if a external relay is triggered?)? Can I use the Aux connection from my FC to my POWER2 Mauch connector to trigger a button? Or just hook directly into the alarm relay connector. I am struggling to find the point of the servo connector of POWER2 on the Mauch to the FC’s Aux.
Hi again Angelo - I meant to reply much earlier.
It will be best to get a battery monitor set up for the on-board batteries so they can be properly monitored separately - even if it’s just voltage and not current.
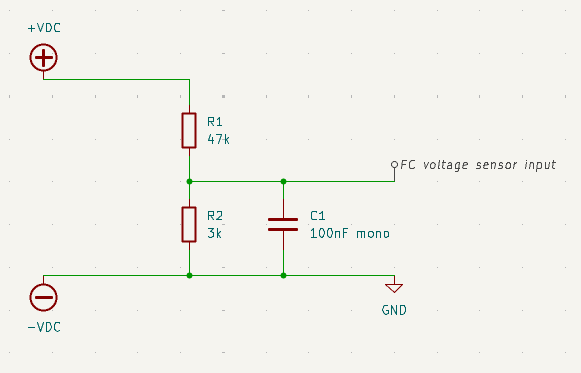
You can even make your own voltage divider and feed it into the Power2 voltage sense pin
Something like this:
Tell me what on-board battery pack you have and I’ll tell you if you need to change those resistor values.
The MissionPlanner Battery Monitor 2 section can be used to accurately set the voltage divider value.
I will have 2 22.2V 6S 2200 mAh LiPos in series with one another to give me 50.4V at full charge.
I think there is a small problem that prevents this completely solving my problem when thinking about the use case I stated in my previous post. While I will be able to measure voltage properly on both batteries with that solution, I have come to an understanding that the Mauch PDB will still provide whatever is sensed on the output as the Bat1 voltage. So if I connect both sources, then disconnect the main power source, the voltage will still be whatever the voltage of the batteries are.
This concerns me because then I dont have a condition to make the drone land as the voltage will be pretty close to the power supply’s voltage. Unless, since I know I have a constant source of power (its tethered), if I keep the failsafe land voltage to 50.2 +/- 0.4V? Since I know the batteries wont hold that 50.4V for very long.
Or do I try and utilize the alarm output as a button. I am assuming I can only trigger that alarm when consuming more than 5A so there is no real great way to test it other than putting props on incorrectly so that the thrust direction is opposite what it normally is (up).