Hi all,
I am in the finishing stages of working up a Mauch Power system for my X8 cinerig.
My questions pertains to the relay feature of the “sensor hub” by mauch power ( https://www.mauch-electronic.com/pl-sensor-hub-x2-v2 ). In the manufacturer provided diagram the relay is designed to be hooked up to a noise or LED alarm to alert the operator if one of the two batteries is at a significantly lower voltage than the other.
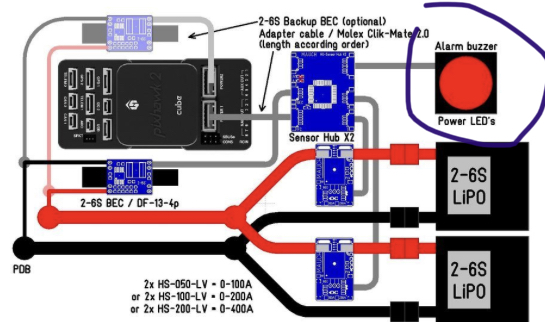
I would like to utilize this feature but have the leads go into a I2C or Bus port on a Pixhawk 2.1 so that I am able to see if the batteries are having an issue in mission planner. Or at the very least have a wireless alarm on the ground that I could hear easier than if it was located on the drone.
Here is a diagram of the 3 connections that are responsible for the relay leads.
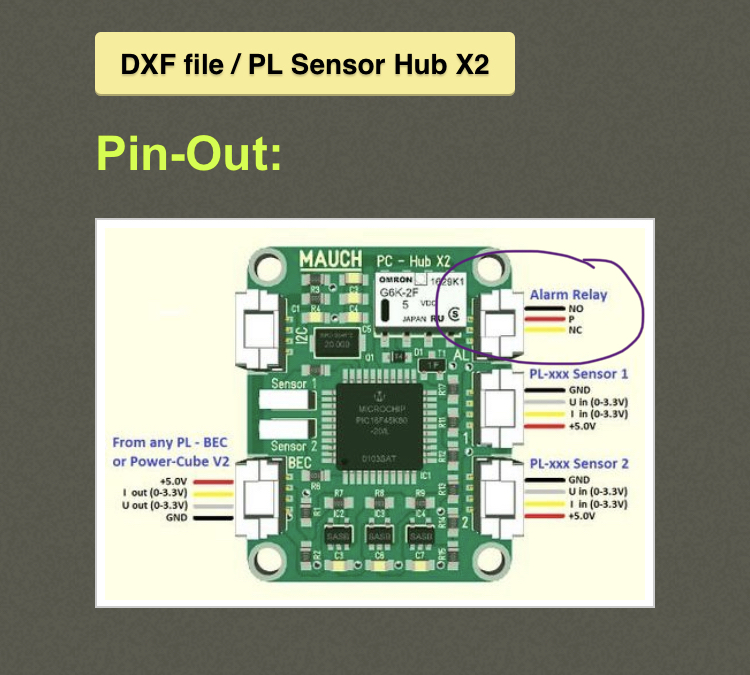
I believe that the NO and NC stand for “Normally Open” and “Normally Closed” indicating that they switch polarities when the undesirable event (in this case batteries being out of wack) occurs. But I am unsure of the meaning of the P lead.
If anyone knows a way to integrate this kind of relay into Pixhawk or a wireless system that could be hooked up to a alarm on the ground help would be much appreciated!
(Edit) after typing this up I noticed the I2C port on the sensor hub module if anyone has experience on how this system is correctly integrated into a Pixhawk 2.1 help would be greatly appreciated.