This is a new topic created to discuss issues with AP Copter-4.0.3 (and higher) being unable to receiver compass and/or GPS data from the Here2. This topic is split from this earlier discussion.
Please report issues below ideally with log files and any other information you may have. To keep the investigation focussed please keep reports focused on CubeOrange and Here2 connection issues.
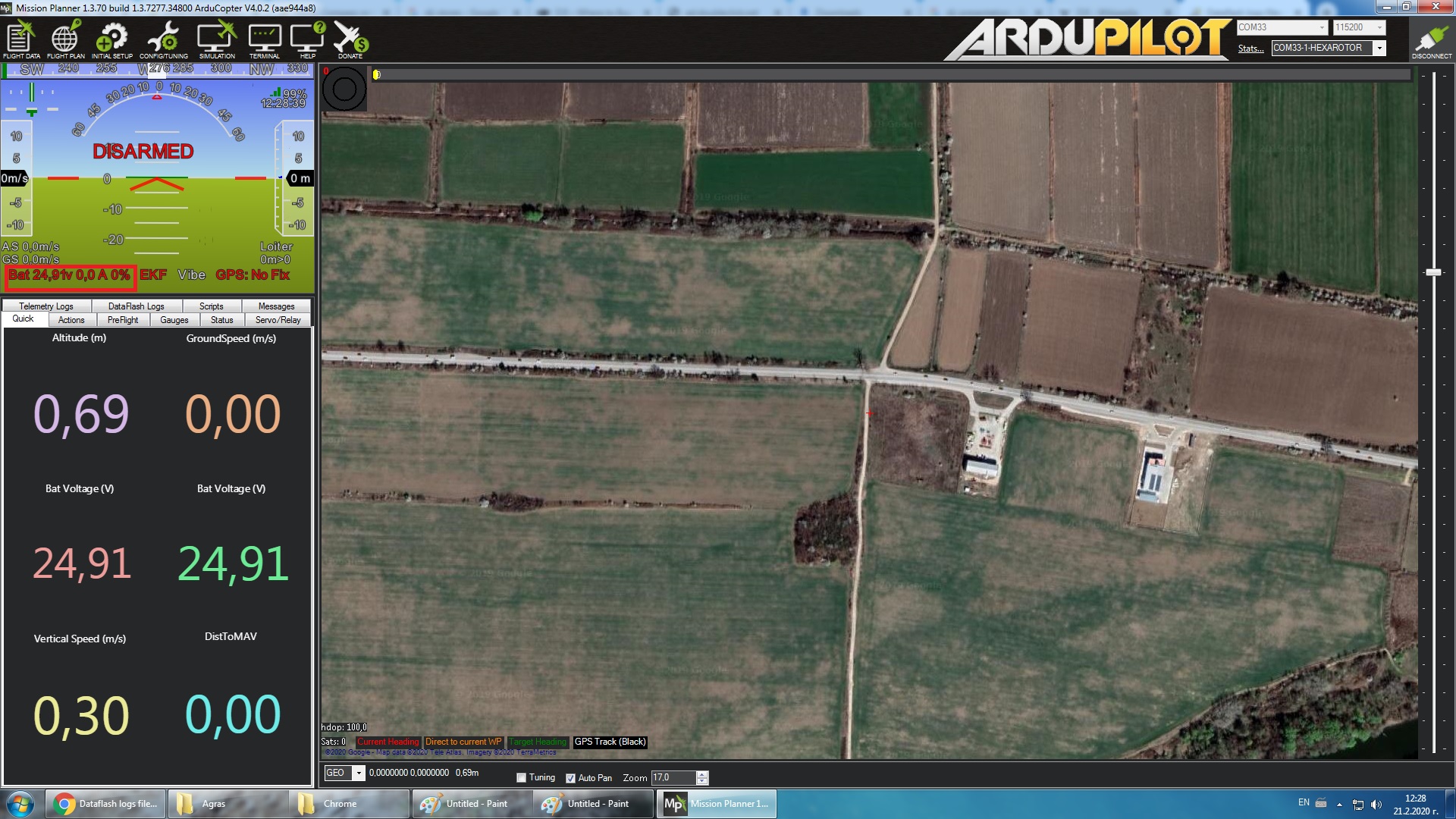
I attached ‘disarmed log’
it rebooted at same setting.
at first booting compass not detected
if click ‘pixhawk reboot’, second boot have compass detected
First time compass recognised and calibrated (on CAN it is only recognised), but this happened only once. When starting calibration, internal compass gets to 15% at the beginning. Then, after 4-5 unsuccessful attempts, calibration was finished. After restart, we could not calibrate compass again.
IMPORTANT! GPS cannot find any satellite at all. We tried different environments and configurations.
I noticed further that battery monitor is not working properly (when placing Cube Black on the same machine it works) and i am attaching screenshots below. It gets from 100% to 0% and back randomly in 0.5 secs interval.
I am on 4.0.3 and I have it working just fine with Cube Orange and Here2.
Change your brd_boot_delay to 7000 and that should work. I originally had it at 5000 which is what I used with my CUAV Neo V2 Pro can gps. However it seems the Here2 needs a little more time to boot up.
Were are seeing this problem on a number of copters. We have several dual GPS aircraft with one Serial+i2c connected Here2 and one UAVCAN connected Here2. The serial+i2c units work without problems, but the compass on the UAVCAN units will frequently fail to be detected or send data. Going through flight logs we can see the UAVCAN compass has a roughly ~50% chance of booting and being detected.
We use a boot delay of 5000 as a standard parameter. However, this only seems to reduce the issue. We have tried adjusting that parameter between 3000 and 7000ms with little improvement. Is there anyway we can help troubleshoot the issue or any additional steps we can try to reduce it?