Hlo someone can tell what wrong is happening with the hardware or the software
Can you host the.bin log file somewherd and provide a link to it?
Cant tell much from those pics. Can you better describe the problem you see?
https://drive.google.com/file/d/1UqXe6R9cGvXEQtE-fzMf9ZMSml3Kwbpb/view?usp=drivesdk
https://drive.google.com/file/d/1UF9MN5J-b2edPiwDhezFbgEg1peta3qa/view?usp=drivesdk 10
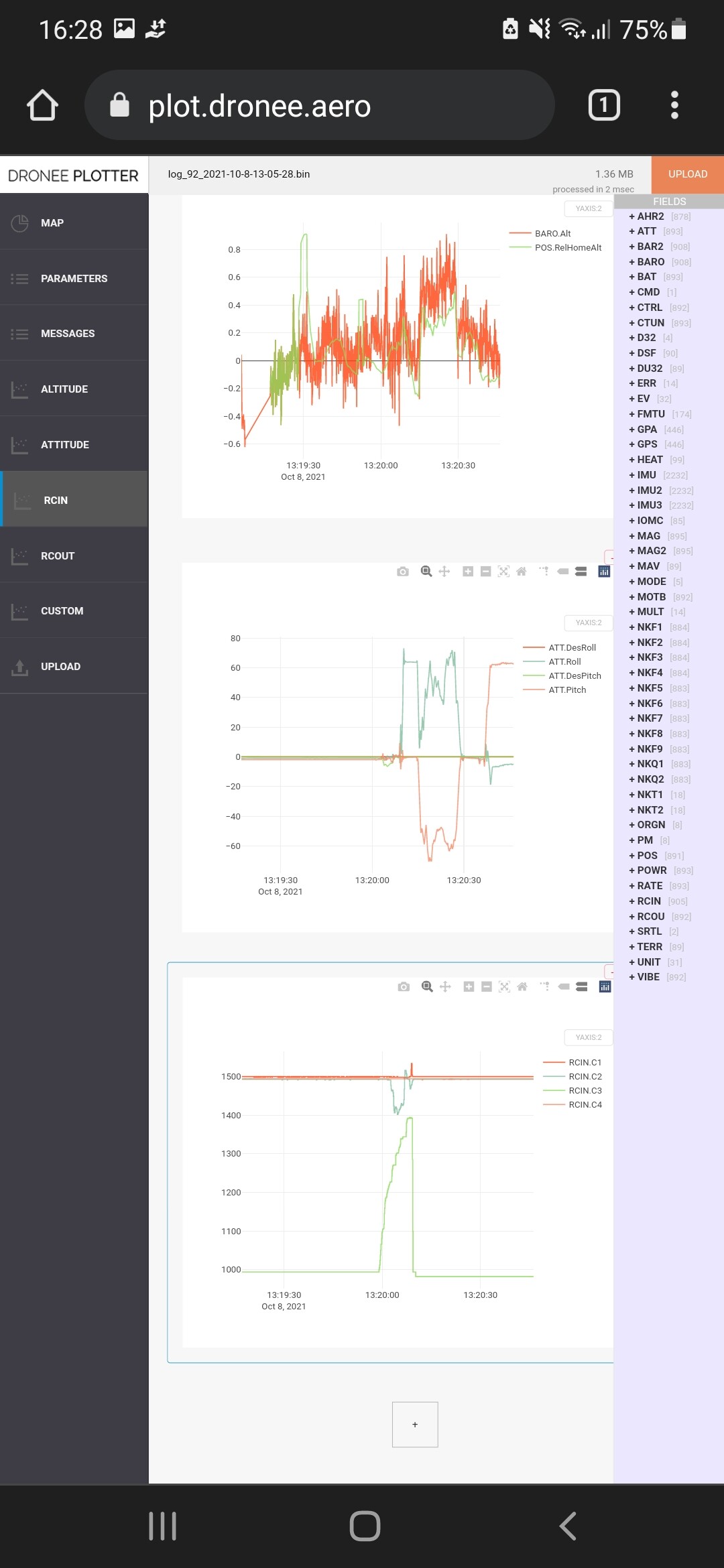
Ah this one! Already saw that video in another thread - it looks like the motors are loose or not mounted correctly on the motor-mounts. Either that or the motor mounts are unusually flexible, which is very bad.
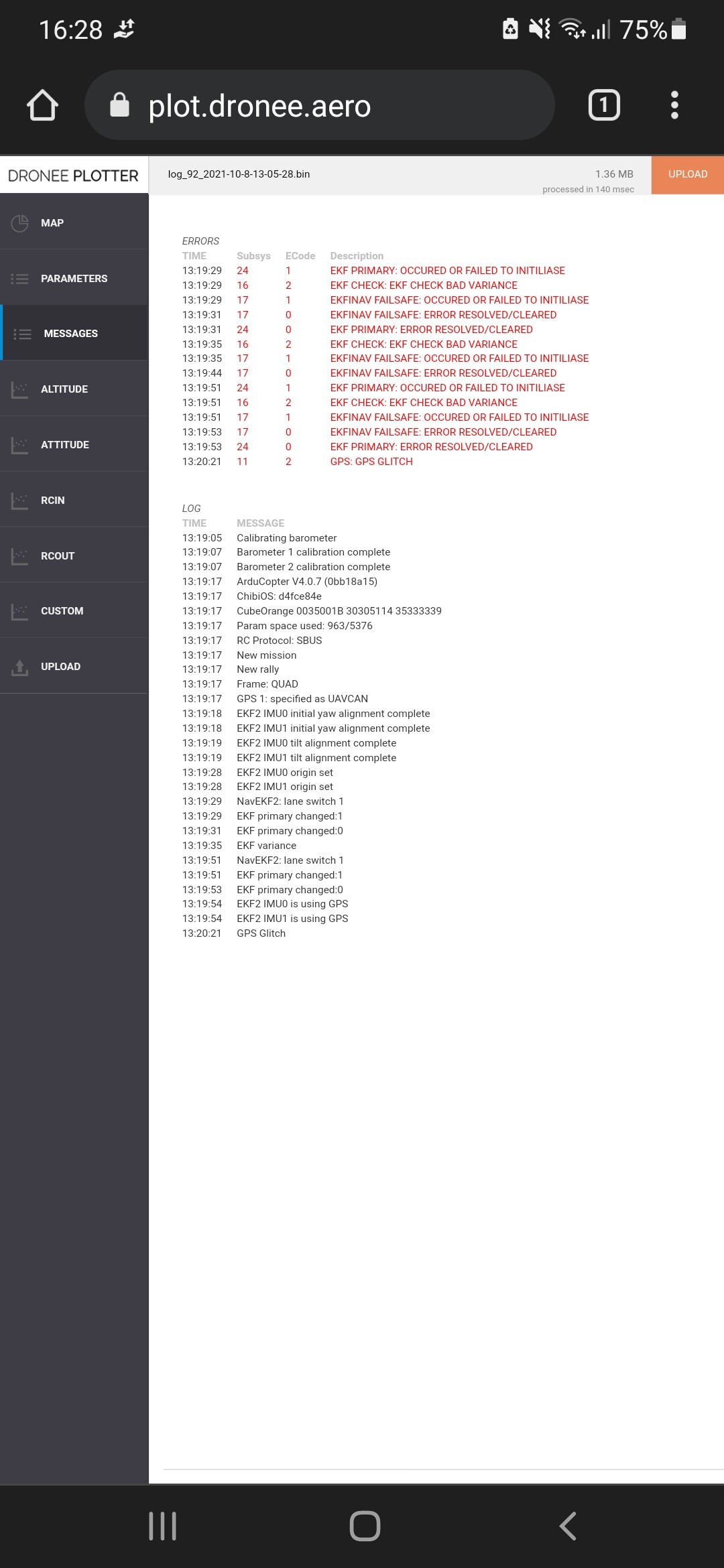
The shaking and carry-on you see is not a problem with the flight controller or GPS, or even the parameters (although parameters can be better).
Start by fixing the physical problems with the motors or motor mounts.
Then connect to MissionPlanner, press Alt A and step through that dialog to set some extra initial parameters.
One thing I would note is you’ve got a top of the line expensive flight controller and GPS on a cheap frame with (probably) cheap motors, ESCs and props.
I would put a cheap flight controller and GPS on that frame, get out there flying and practising, configuring, possibly crashing…
And get a good solid carbon fibre frame to go with that expensive flight controller and GPS, for when you’ve got the whole process nailed down and less likely to crash.
There is something strange with the parameter file extracted from that log. I don’t see any motor outputs assignments yet clearly there are RCpout’s shown when graphing them. Update to latest Stable V4.1.1 and start from defaults. Better yet load Arduplane 1st then Copter and start over.
Ok sir. Will Tarot 650 Iron Man better for this flight controller and gps.
In Tarot I would choose the newer X4 (TL4X001) or X6 (TL6X001) frames, the old frames frames had no space in between the plates for mounting anything due to the folding mechanism. But the old ones did take a beating.
But I would advise get that current frame working with a cheap flight controller and GPS first, get all your mistakes and crashes out of the way before ploughing a new frame and Cube Orange into the ground.
I have 2 other flight controller
1)Matek F765
2)Matek H743
Do i use it after installing copter software
Can you analyze this log file see if its alright
https://drive.google.com/file/d/1VW9nZyOhSZOVMkOC_tZ-zI-nDCpa-oVc/view?usp=drivesdk