Hello,
First time messing with a pixhawk on my own, I want to (a) run my wiring plans by and (b) ask a few specific questions about BLHeli esc wiring and serial comms on the pixhawk cube mini carrier board.
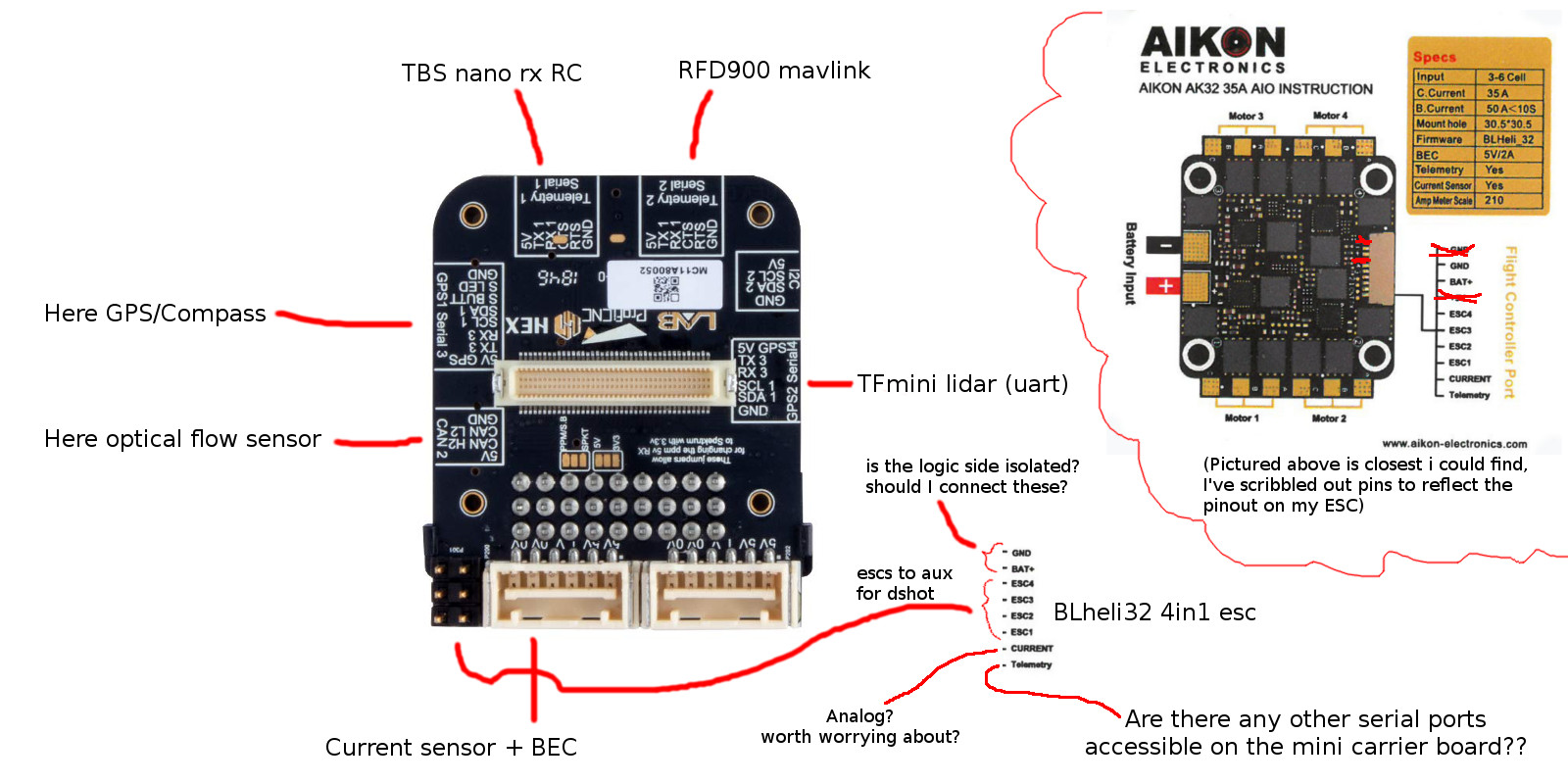
^Here is my plan at the moment. It involves:
Telem 1 - crossfire nano reciever running RC control over mavlink (will discuss this more)
Telem 2 - rfd 900 mavlink telemetry
GPS 1 - here gps+compass module
GPS 2 - (Serial 4) using UART for tfmini LIDAR
CAN 2 - for hereflow optical flow sensor
AUX - ESC control outputs
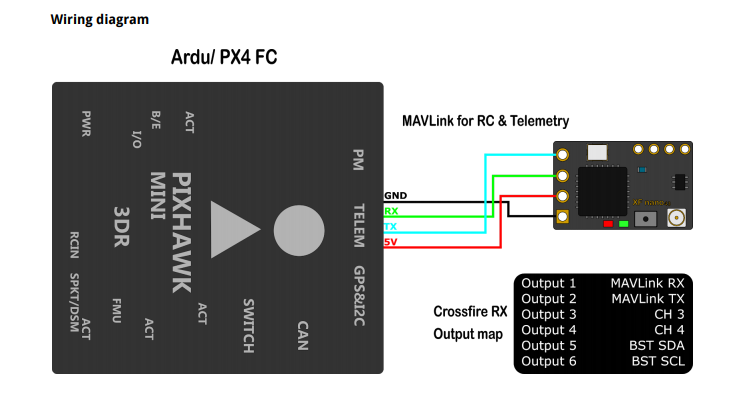
^This is how I’m planning to use the receiver on telem1 port.
So (a) Are there any problems with this approach? What’s the practical difference between running the RC reciever thru UART using mavlink instead of the more typical SBUS input (I generally try to avoid weird digital-over-analog legacy things on a matter of principle).
(b) the questions posed on the plan image. Are the bat+ and gnd on the signal side of the 4in1 esc relevant? Is the current output an analog/legacy thing and the digital telemetry output also sends that information? Are there any more available serial ports in the mini carrier board that i could run to the esc telem?
(similar questions posed, with answers i found inconclusive:
https://discuss.ardupilot.org/t/cube-mini-carrier-board-debug-connector/54328
)
I can run the receiver in the typical way SBUS to free up a telem port for the ESC, would this be a good decision?
Thanks,
Matthew