How’s it going pilots and engineers, I need some help. I’m putting together a EFT E06 AG. I have built 2 AG’s and was able to calibrate the BLDC motors and ESCs( Pixhawk cube, Frisky ppm receiver access) with the help of the community (I plan on flying all 3 in 2024) These FOCs dont want to calibrate, set end points to 1100us min, 1940us max pwm outputs, Ive also acquired an siyi mk15 radio, it connects and everything is working through the SBus Rx in, but I get no signal to the x6 ESCs, also can’t find any videos if the mk15 pwm setup, the receiver has the port fort it but no docs on install. Any help would be appreciated, been watching vids and struggling for the last 2 weeks. Cheers!!
What ESCs are they? Have you got a link to them online?
Some with a fixed PWM range dont need calibrating, and some can not calibrate.
It sounds like there’s a couple of issues going on.
Maybe send more details, a couple of photos, and a parameter file.
Is it the Hobbywing Xrotor Pro X6 ?
If so you’ll need these parameters and dont worry about trying to do the ESC calibration:
MOT_THST_EXPO,0.73 for 23inch or 0.72 for 22 inch
MOT_PWM_MIN,1100
MOT_PWM_MAX,1940
and use MissionPlanner motor test to check and set:
MOT_SPIN_ARM
MOT_SPIN_MIN
Still go ahead and provide your full parameter list and other details
Thank you for the replay Shawn, they are hobbywing
Will send prams, radio channels now backwards, gonna reflash and start fresh, do you have any diagrams for the pwm on the jiyi receiver, I got the standard mk15 package that includes the receiver, the subs works fine but I can’t find any docs on how to set up the pwm output.

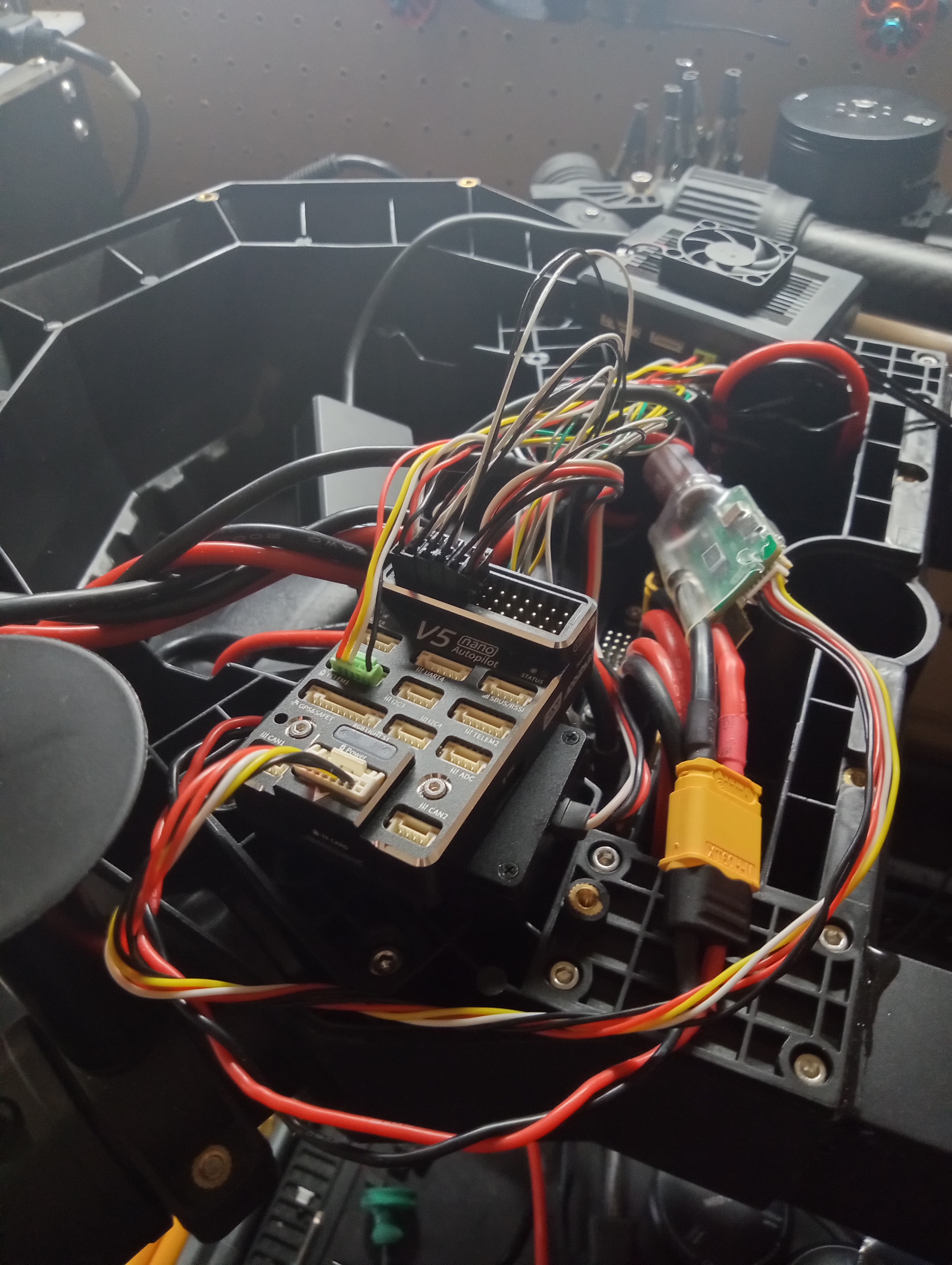
Is that CUAV power module just used for supplying the flight controller (obviously) and voltage monitoring?
The wires feeding it with battery voltage cant possibly be passing all the current from batteries to everything else ![]()
That V5 Nano will need some level of antivibration mounting, they are a great little flight controller.
Why do you want PWM output from the receiver? SBUS is preferred if thats what it does.
You can reset all parameters to defaults without reflashing different ardupilot firmwares.
Just make sure you are using latest stable copter firmware.
I also have a pmu connected to the rail for signal power it’s occupying M5. Sbus, m1, M2, m3, m4, pmu. The cuav Nano is on its own power supply, do you have to use jumper with pmu to get power to signal rail, worker fine on the cube just plugging it to one of the empty m slots
When I email hobbywing they told my to test the X6 pros with a pwm reciever , tje motors are getting 6s voltage through the PDB, have you used the x6pros on sbus ?
You shouldnt need to test them with a receiver directly.
The ESCs will get PWM from the flight controllers motor outputs, and MissionPlanner motor test is the way to go.
I’ve worked with other copters with these motor/ESC combined units and they seem reliable and good quality. I have no reason to believe they wouldnt work, and any hold-up in proceedings will just be some configuration issue.
It sounds like you have all the connections correct. The 5volt BEC (or what you call a PMU??) should only connect to the + and - pins of the “servo” connectors.
Hi, has your problem been solved? Set the LOG_DISARMED parameter to 1.

Disassemble the propeller and perform a motor test. Then remove the SD card and upload the log file in the APM folder.
Will try, turns out I have the x6 plus and not the pro, the difference is 1050min 1950 max pwm output, mission planner wouldn’t let me set the pwm outputs beyond 1048 min 1948max, i fixed any reversed channels, also there is better documentation for the plus but it doesnt specify the pwn rail output voltage, set to 5v but some escs run on 3.3, ill upload the prams when tonight after I try the above
Will try log_disarmed
This isnt a limitation of MissionPlanner - it lets you set any value you need to for MOT_PWM_MAX and MOT_PWM_MIN if you have MOT_PWM_TYPE,0
You should not be trying to set anything motor-related in the RC_ or SERVO_ parameters once you’ve done the RC calibration procedure.
You can send your parameter file, or send that .bin log after you’ve done tests with LOG_DISARMED
I believe there must be some configuration error.
The PWM peak voltage of 3.3v hasnt been an issue with those Hobbywing integrated motor sets, but if you think it would help you can set BRD_PWM_VOLT_SEL,1 for 5volts PWM signal. No I was wrong, your flight controller doesnt have that feature, but it shouldnt be needed anyway.
So should I pull the center pin on the bec harness then? Rail is getting power, when I plug my first sbus to pwm reciever it lights up
The RCin input pins have a supply pin that is powered by the flight controllers regulated 5v supply. That is nothing to do with all the other motor/server outputs and there is no connection - it just happens to be in the same rows of pins.
On the CUAV V5 Nano, and others where possible, I tend to use the SBUS/RSSI port with the locking connector, rather than the old fashioned servo connector input. But that’s not a big issue.
Those integrated motor/ESCs dont need a supply voltage on the servo rail at all - but keep it there if you like in case you have retracts or some other accessory than needs power.
Set log_disarmed to 1 first, it will continue your setup and operation, it will help solve the problem quickly.
Here are the prams, I also tested my other rigs and the escs and motors pick up just fine, I have the cube orange on both, i do still have a pixhawk 2.4.8 that was set up on my first machine, i could test it. I heard that the cuav power module may be the culprit, can anyone confirm this. Thank you to all who have responded I appreciate the help.
I’ve never had a real issue with the CUAV power module. I did have a slight issue with it’s voltage sensing accuracy but that’s not an issue for us here.
This is a non-starter
BRD_VBUS_MIN,5.2015 should be BRD_VBUS_MIN,4.8
and is likely the problem.
Change these:
ARMING_CHECK,1
DISARM_DELAY,5 or 10, but I like 5
MOT_SAFE_TIME,1
INS_ACCEL_FILTER,10
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
It looks like RC calibration is not done since all RC_ values are at defaults, or you’ve got the worlds most perfect radio ![]()
Once RC calibration is done, do not change anything in RC_ or in SERVO_ parameters except where related to accessories like landing gear or gimbals and similar.
Next step is set up the battery voltage monitor. Once it’s working, use MissionPlanner Initial Parameters to set the correct voltages and motor scaling.
Check with me if you have any doubts about that.
Start with:
BATT_MONITOR,4
and reboot the flight controller.