Hi together,
I am about to tune a small 7" build (Chimera 7, closely inspired by @andyp1per 's blog post). It is flying fine mostly, filters are performing well, vibes during hover around 2 usually. However, the altitude control feels very(!!!) spongy in AltHold, Loiter etc. I raised PILOT_ACCEL_Z to the limits and above, but that did not help. Also tried to raise PSC_VELZ_P to 9.0, bit that also did not help a lot. An atempt to tune the PSC_ACCZ_ gains only confirmed that there is not a lot of headroom until oscillation starts.
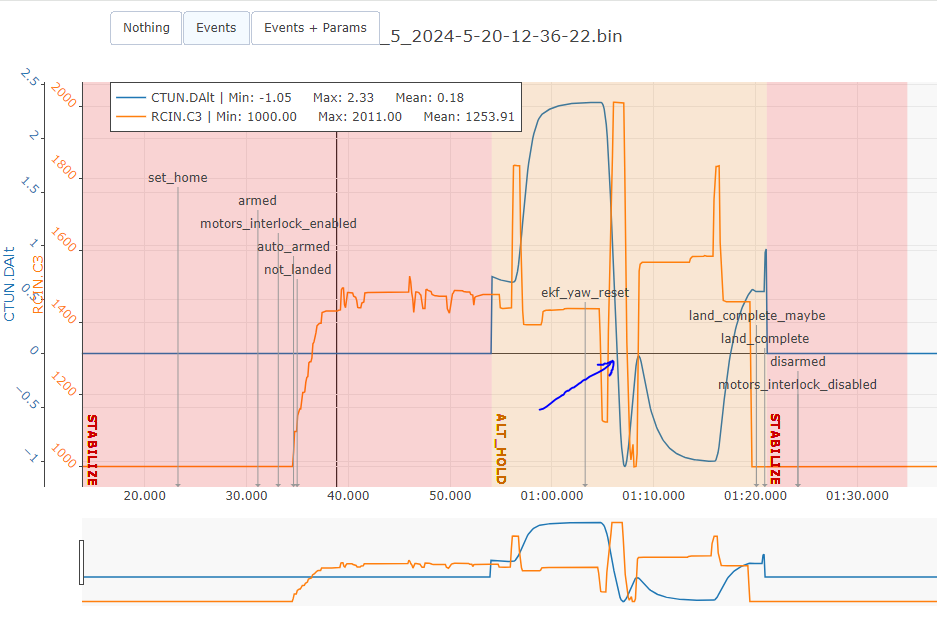
Here is a screenshot of what I think might be the reason: CTUN.DAlt is following a sharp throttle input only in a very slow and sluggish way:
Where is DAlt coming from? Is there any (configurable) low pass filter between C3 and DAlt? Maybe in the guts of EKF3?
BTW, the screenshot actually shows a (slight) ground impact with throttle stick on abs max position at the blue arrow. The vehicle is easily able to climb 15…20 m/s instantly and straight up in Stabilize.
log: https://drive.google.com/file/d/1J2cq8ea01uyLZCWDH7S70x5ON8_JQ8kF/view?usp=drive_link
params: attached
log_6_2024-5-20-14-04-52.param (21.6 KB)
Thanks for any hints,
Holger