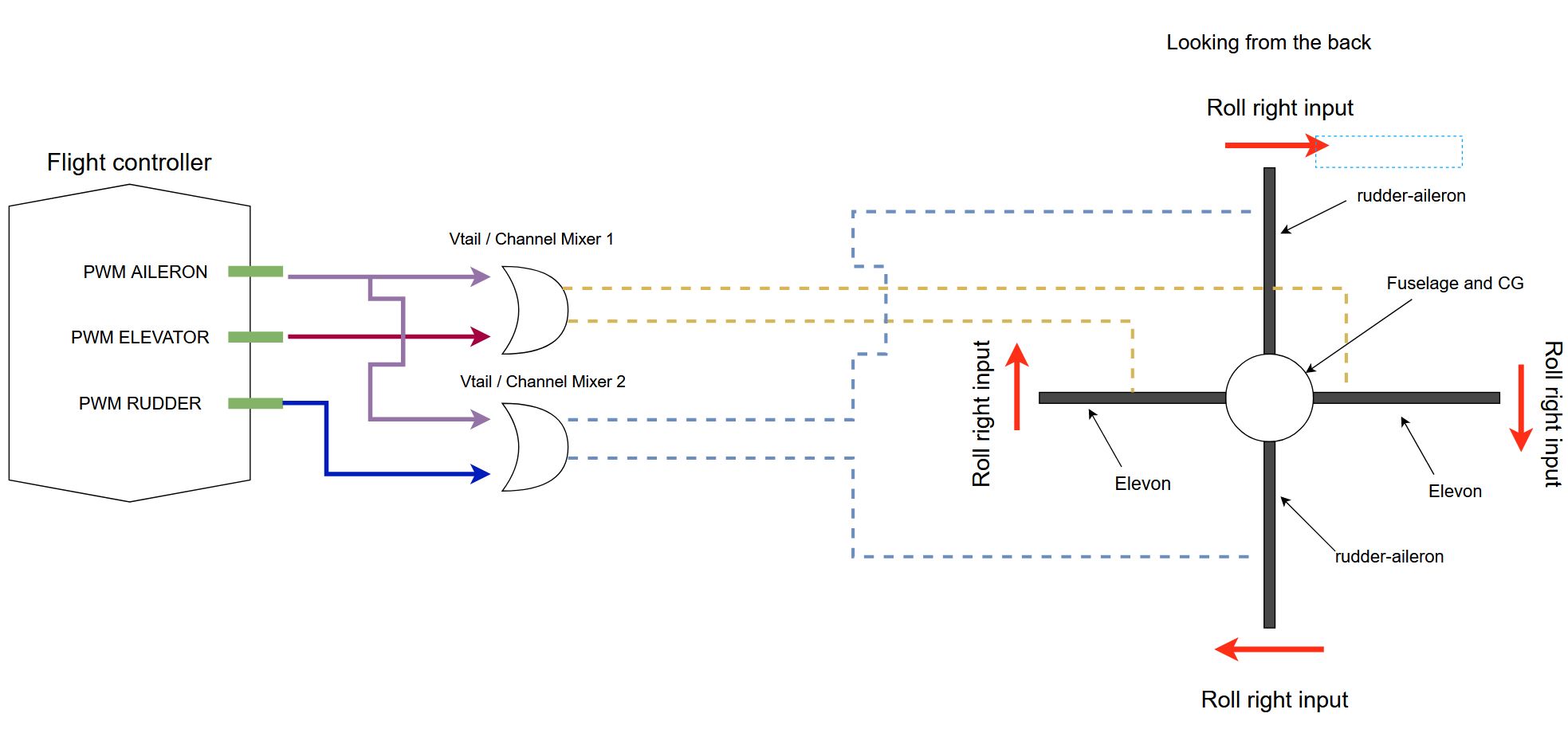
I’m designing an airplane where i do not have aileron control surfaces on the main wings. The roll control comes from the two all moving horizontal surfaces (like the elevons of an F16). However i would like to have also aileron-rudder mixing on the two all moving vertical stabilizers to increase roll authority. My vertical stabilizers are installed one on top of the other (it is a cross tail - similar to a missile). Now when i want roll right control input, all 4 moving surfaces will tilt in the same direction (clockwise when looking from the back) relative to the roll axis. So the airplane will have two elevons (horizontal stabs) and two ruderailerons (vertical stabs). I do not want to do this through my transmitter or in manual mode, but when the autopilot has control. Since I’m new to ardupilot i was thinking to utilize two good old vtail/channel mixers to do the job, and simply set PWM 1 to elevon, PWM 2 to elevator and PWM 4 to rudder. Then mix the elevator and aileron PWM on vtail mixer 1 with the two outputs to the elevons and then mix aileron and rudder to the second vtail mixer with the two outputs to the two rudderailerons. Some people said that this will confuse the flight controller/auto pilot. What do you guys think? See attached schemartic.
This idea might be a little (a lot?) half baked so I’m not sure it will work. More an exercise of thinking out loud…
I can’t speak to the code or what options are available at that level, but one thing to look at might be treating the vertical surfaces live a V-tail and then using the MIXING_OFFSET to null out the V-tail elevator function. V-tail will act as a rudder, but in stabilized (Stab, FBWA, Auto, etc) modes V-tails will also co-ordinate turns so this could be manipulated and used as a roll input.
All this mixing is done in the FC. V-tail and Elevon are already functions of Arduplane simply by assigning the servo outputs such as SERVOx_FUNCTION,79 for the left V-tail. Don’t use RC channel mixers or anything external because Ardupilot will treat inputs vs outputs differently depending on the flight mode. No matter the outputs, the inputs into Arduplane need to be simple pitch, roll, throttle, yaw (in what ever order you want). And if you’re new to Ardupilot, but familiar with traditional RC planes I’ll give you one bit of advice: Turn off your RC trims.
Thanks for your input and i get your idea, but, I’m wondering from where will the aileron output will come to the rudders?
Do you think that using vtail mixers will mess the autopilot? The way i see it is that each control axis is treated as independent single output (Ail, Ele and Rud). In a coordinated turn, or in an only rudder output the two rudders will turn in the same direction via the rudder signal coming from the vtail mixer that received only rudder signal. Now in the instant where the autopilot demands roll and rudder output at the same time, the elevons will have a s symmetric 50:50 inverted throw and the rudder/ailerons will be somewhat inverted but 80:20 favoring the turn…
Again, I’m not 100% sure this will work for you but I’ll try to answer your questions.
Arduplane will send outputs to the yaw axis (rudder, V-tail, etc) when a roll is commanded in any stabilized mode. So anything other than manual mode. For your use case you might need to trick some of the reversals to get it to go in the direction you want but that’s pretty normal in most cases anyhow.
Arduplane already has mixers in the code for V-tail and Eleveons. Using any kind of RC mixer or external mixer will mess with the flight controller. The flight conroller is already doing all the thinking. For example when you command a pitch up by pulling back on the stick, the FC makes all the decisions on what surfaces to move and how much. Even in manual mode it will do that. In manual mode the surfaces will move based on the stick input. In a stabilized mode the surfaces will move to reach the desired pitch angle dictated by the pilot or the mission command.
So actually v-tail and elevons are easy with Ardupilot. You set up inputs for AETR, and then say this servo is for the left elevon, that servo is the right elevon, and so on. On most common configurations of v-tail and elevons, nothing else is needed in terms of mixing setup.
For your use case, you’ll need to play with the mixing gains, and offsets to get the V-tail to do what you want. Again, not unusual but your case might be more extreme.