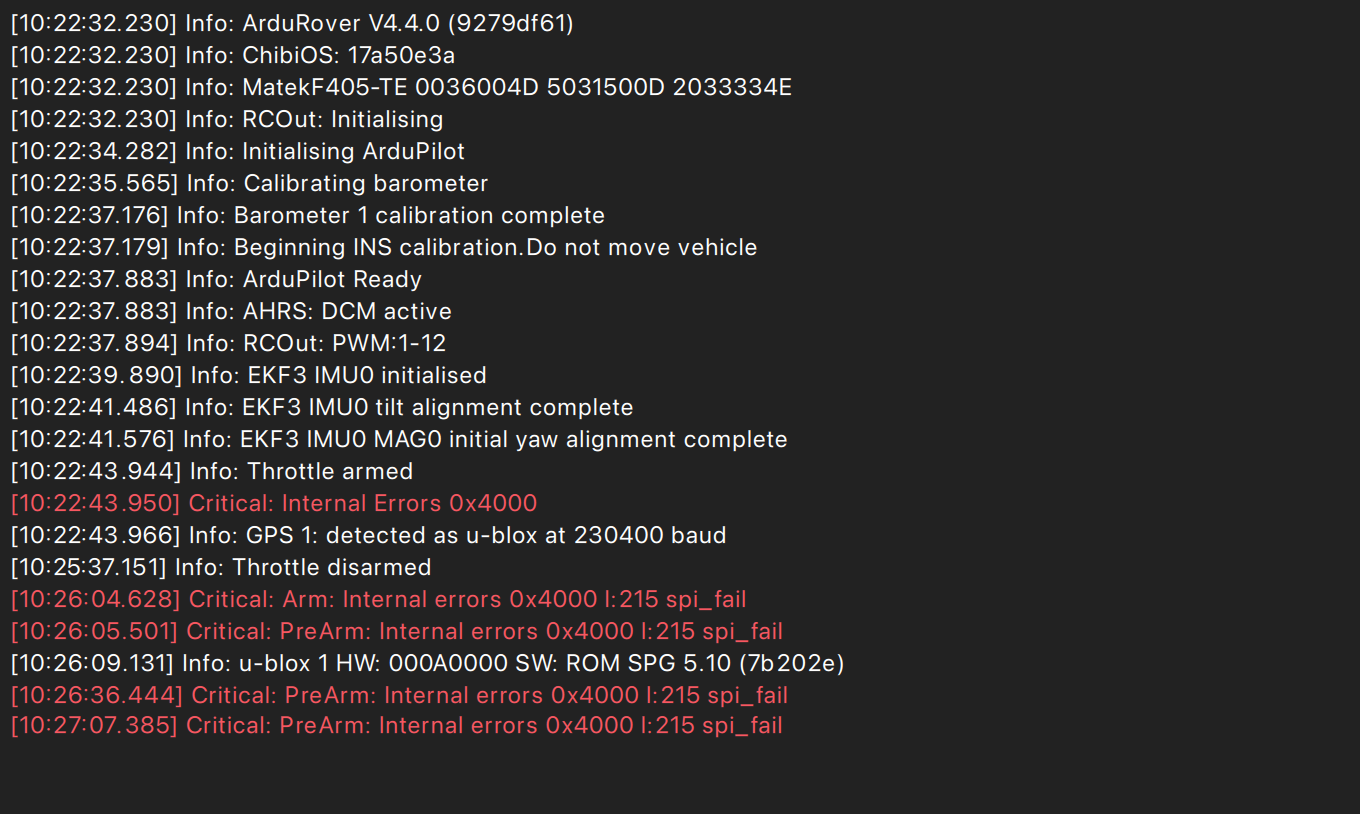
I’m having this error pop up after arming and disarming every time. One first reboot, everything is green until I arm. After I arm the rover, I get Critical: Internal Errors 0x4000. When I disarm and try to rearm, I get the error in the title.
I have two rovers with Mayteksys F405-VTOL with Mayteksys m10q-5883 GPS units onboard. We’ve tried flashing different versions of Ardupilot with no success; I’m at a loss. So, please help me, Obiwan. You are my only hope.
Hey there, did you find out what was causing your error?
I’m getting the same error where I can run MP, boot, arm, power motors for a few minutes, then reduce throttle to lowest (motors shut down), then can no longer get any response from the motors. If I look on the Data tab at the flight graphic, I see: PreArm: Internal errors 0x4000 I:215 spi:fail
Uploaded the new Copter firmware today (4.5.0) with no success