Hello,
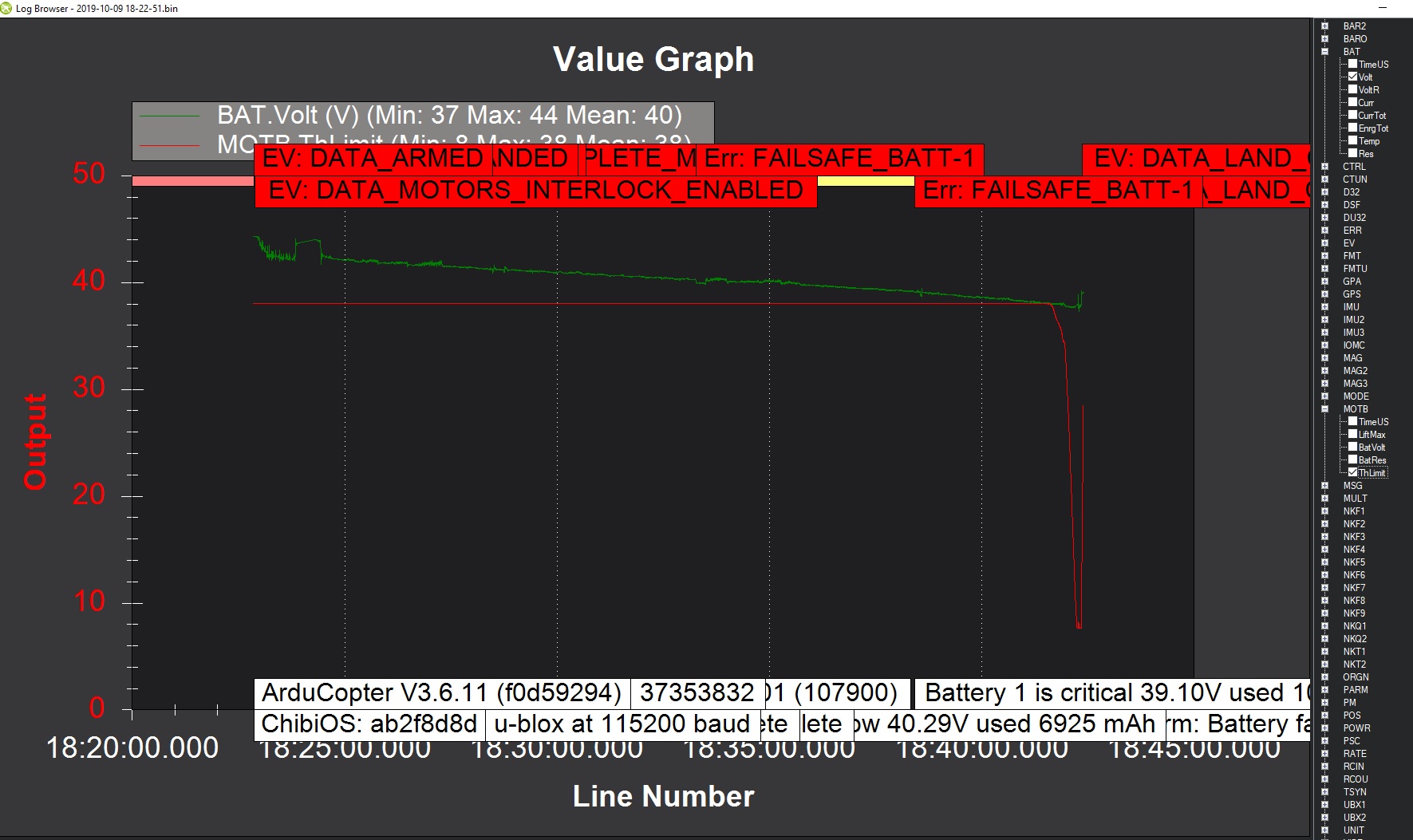
Testing the end off battery, I had throttle limit issue starting at log line 225000, instead motor was not at 100% (1920pwm max esc calibrated) but at 1800pwm (also output is not linear so 10% remaining represent 20% of thrust……) .
So drone slowly fall down, until I released the load. (servo controled).
Also I check Mot thr max param was set to 1.
I Don’t understand this behavior, can you explain to me wich parameters allow to adjust this behavior ?
As I said it is current limiting. Since your current limit and minimum voltage is enabled, the current limiter tries to keep voltage above MOT_BATT_VOLT_MIN. See line below starts with “_float bat_current_max = MIN(…” If the actual voltage drops below voltage min, then the current limit become the actual current.
So it is a perfectly normal behavior. Either disable MOT_BATT_CURR_MAX or lower MOT_BATT_VOLT_MIN.
(anyway if you need curr_max then your drivetrain is underpowered)
// return current_limit as a number from 0 ~ 1 in the range throttle_min to throttle_max
float AP_MotorsMulticopter::get_current_limit_max_throttle()
{
AP_BattMonitor &battery = AP::battery();
if (_batt_current_max <= 0 || // return maximum if current limiting is disabled
!_flags.armed || // remove throttle limit if disarmed
!battery.has_current(_batt_idx)) { // no current monitoring is available
_throttle_limit = 1.0f;
return 1.0f;
}
float _batt_resistance = battery.get_resistance(_batt_idx);
if (is_zero(_batt_resistance)) {
_throttle_limit = 1.0f;
return 1.0f;
}
float _batt_current = battery.current_amps(_batt_idx);
// calculate the maximum current to prevent voltage sag below _batt_voltage_min
float batt_current_max = MIN(_batt_current_max, _batt_current + (battery.voltage(_batt_idx)-_batt_voltage_min)/_batt_resistance);
float batt_current_ratio = _batt_current/batt_current_max;
float loop_interval = 1.0f/_loop_rate;
_throttle_limit += (loop_interval/(loop_interval+_batt_current_time_constant))*(1.0f - batt_current_ratio);
// throttle limit drops to 20% between hover and full throttle
_throttle_limit = constrain_float(_throttle_limit, 0.2f, 1.0f);
// limit max throttle
return get_throttle_hover() + ((1.0-get_throttle_hover())*_throttle_limit);
}
I set curr max to 125a and now i understand that when we activate current limiting if we not reach the curr max but we pass lower than mot bat volt min, ap takes actual current as limit!
Okey now its clear.
I think that instead of mark in copter user guide that good value for start mot bat volt min is failsafe voltage, it need to mark good voltage to start is the lowest voltage that your battery can handle without damage. So for lipo 3v x cell and for liion 2,8v /cell.
If not user like me that read it can set this value to voltage failsafe and if like me it set curr max, as soon as the uav drop below failsafe it crash…
When you have current limiting value set it will limit the throttle to a point that will prevent the battery voltage being pulled below your minimum voltage set in the MOT parameters. Appart form prolonging the battery lifetime, it lets you maximise flight time by limiting the power draw when the battery is getting low and causing a battery failsafe.
Notice in the code that it does not pull the maximum throttle below the hover throttle. The lowest value it can pull maximum throttle is: Hover + (1-Hover)*0.2
Now the problem. This should never reduce the maximum throttle below the hover throttle. It should simply limit your maximum lean angle and ability to climb quickly. So it should never cause the aircraft to descend unless the parameters have been set badly. In particular if your hover throttle is set too low.
So we have good news and bad news… And great news…
The good news is you have not set the parameters badly.
The bad news is we have a bug.
The great news is I found it
So the problem is we are not accounting for the increase in hover throttle caused by the battery voltage scaling correction. Because your maximum thrust has dropped by 20% at this point in the flight, when you get the reduction it goes lower than it should.
Thanks for your log and I am sorry for my mistake. I am glad you did not damage your aircraft!
This should never reduce the maximum throttle below the hover throttle. It should simply limit your maximum lean angle and ability to climb quickly. So it should never cause the aircraft to descend unless the parameters have been set badly. In particular if your hover throttle is set too low
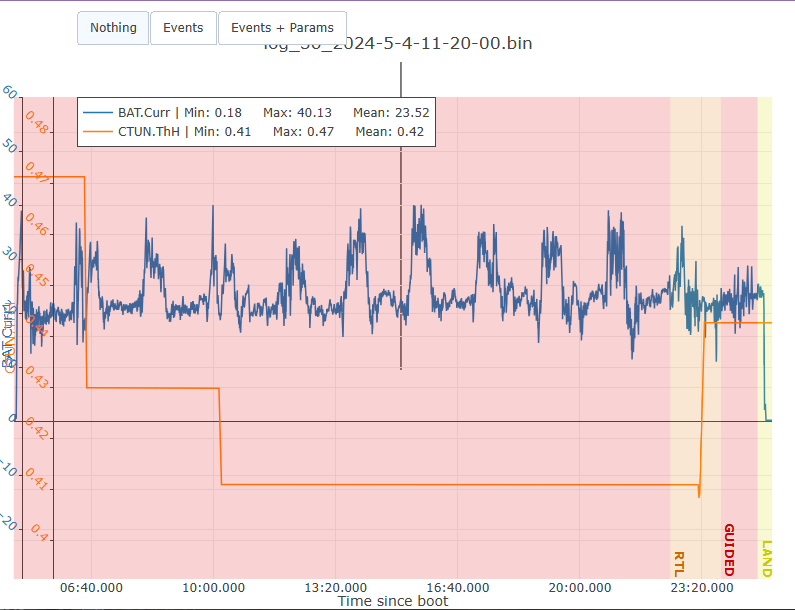
*" been fixed now? If yes, how can I test this. I want to put an max current limit of 30A (10sec) to my drone. As you can see in the image below that while trying to achieve max speed, sometimes my drone current goes beyond 30A, specially when it is flying against the wind. I want to keep it under 30A. So, if I use current limiting feature, would it behave the way you have mentioned. If this activates, what can I observe in logs to verify if current limiting is working or not? Also, if you say hover throttle, do you mean CTUN.ThH?
The limit will not prevent the peek from going over 30 A. If it sees the current going over 30A it will reduce the throttle over a few seconds to bring it back under 30A.
@Leonardthall Thanks for the reply. I understood that it might go beyond 30 but eventually it should come down under 30A. To test this I have performed a ground bench test.
I conducted a ground bench test of my drone (total weight of drone is around 2Kg) by securing
my drone to a fixed mount on ground and giving takeoff command using QgroundControl.
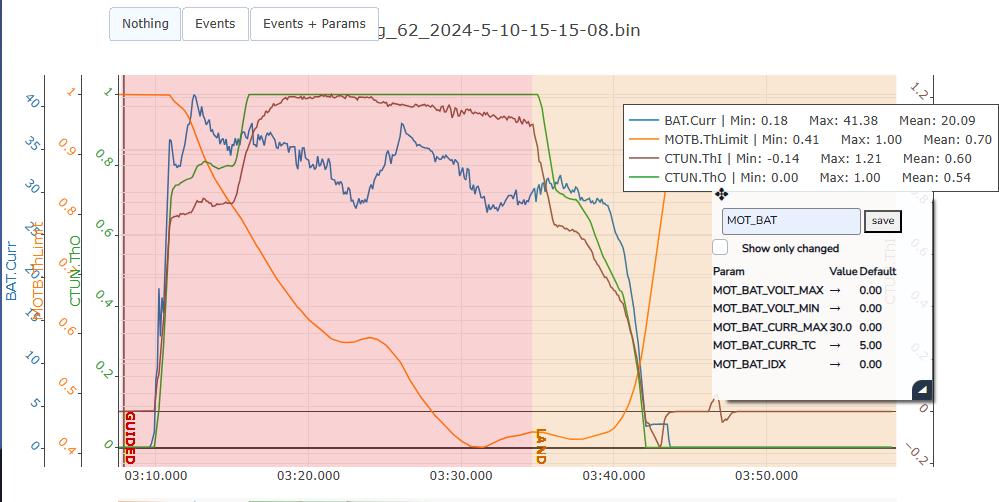
My MOT_BAT_CURR_MAX is 30 and MOT_BAT_CURR_TC is 5.
From the graph of the logs, there are observations which I am not able to correlate properly.
MOTB.ThLimit starts decreasing as soon as current exceeds 30A, but CTUN.ThO does not decrease.
From the graph it appears that current decreased but again it increases.