Hi!
I start a Webots simulation with an iris quadcopter and this behavior was terrible - as soon as I added joystick thrust (in qgroundcontrol) the quadcopter flew up like crazy
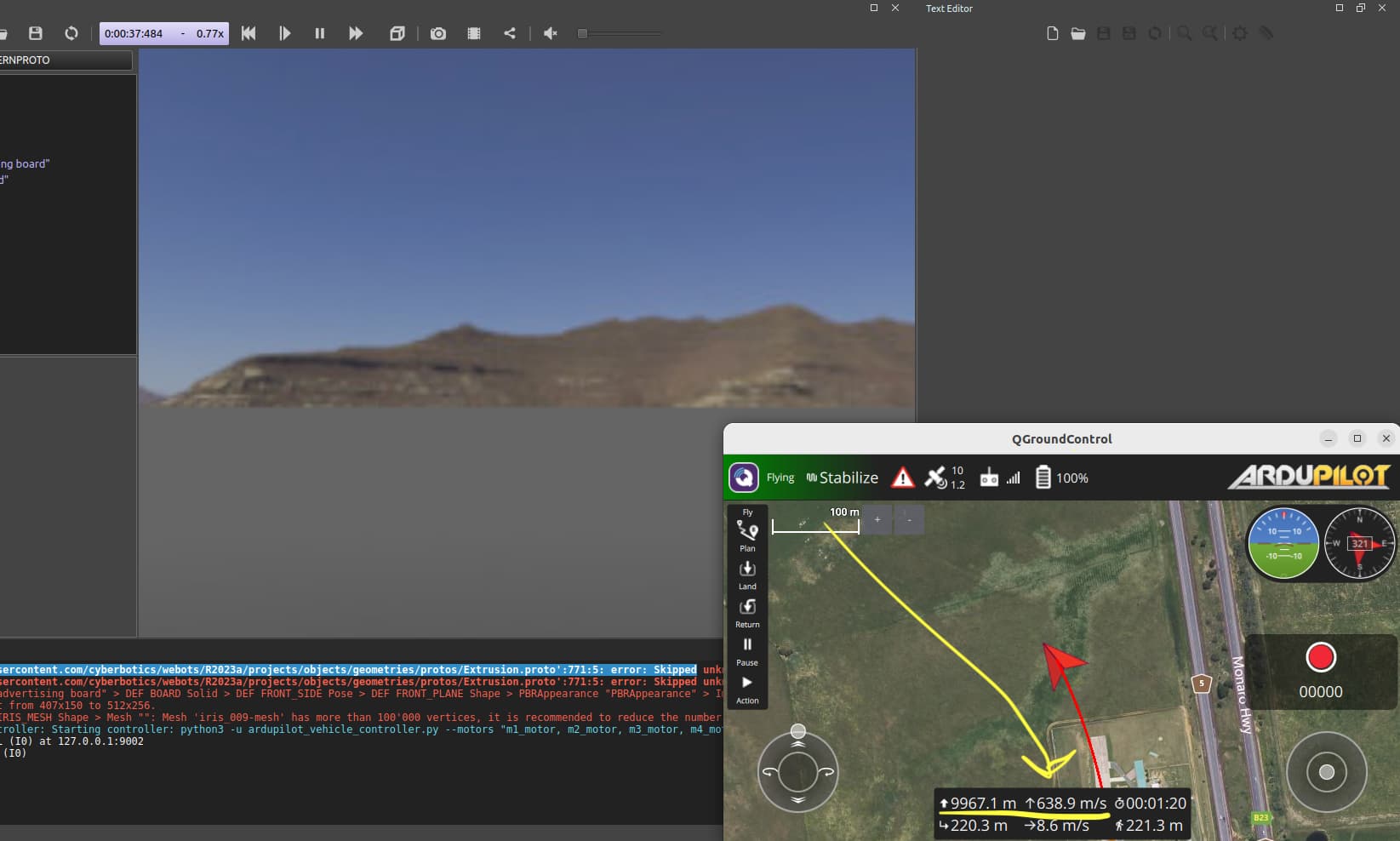
You can see these indicators in the picture.
This has never happened with other simulators.
Ubuntu 22.04
Webots r2023b
ArduCopter V4.5.0-dev (1641aa42)
./ardupilot/Tools/autotest/sim_vehicle.py -v ArduCopter -w --model webots-python --add-param-file=./ardupilot/libraries/SITL/examples/Webots_Python/params/iris.parm