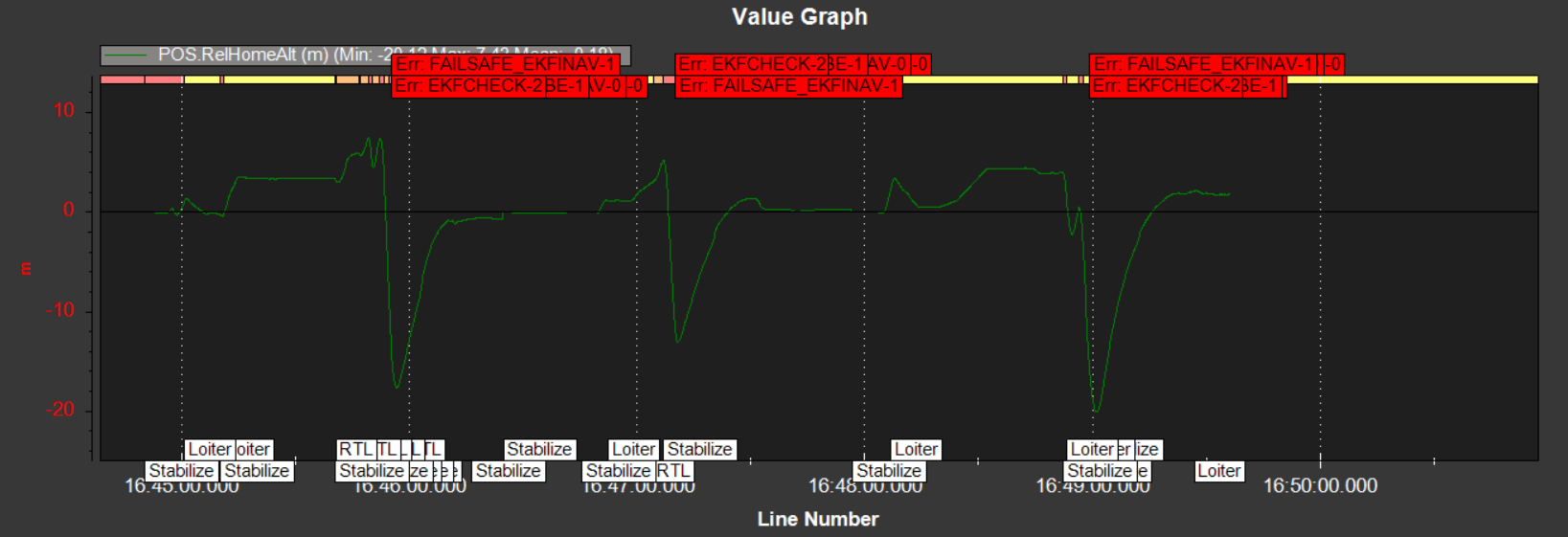
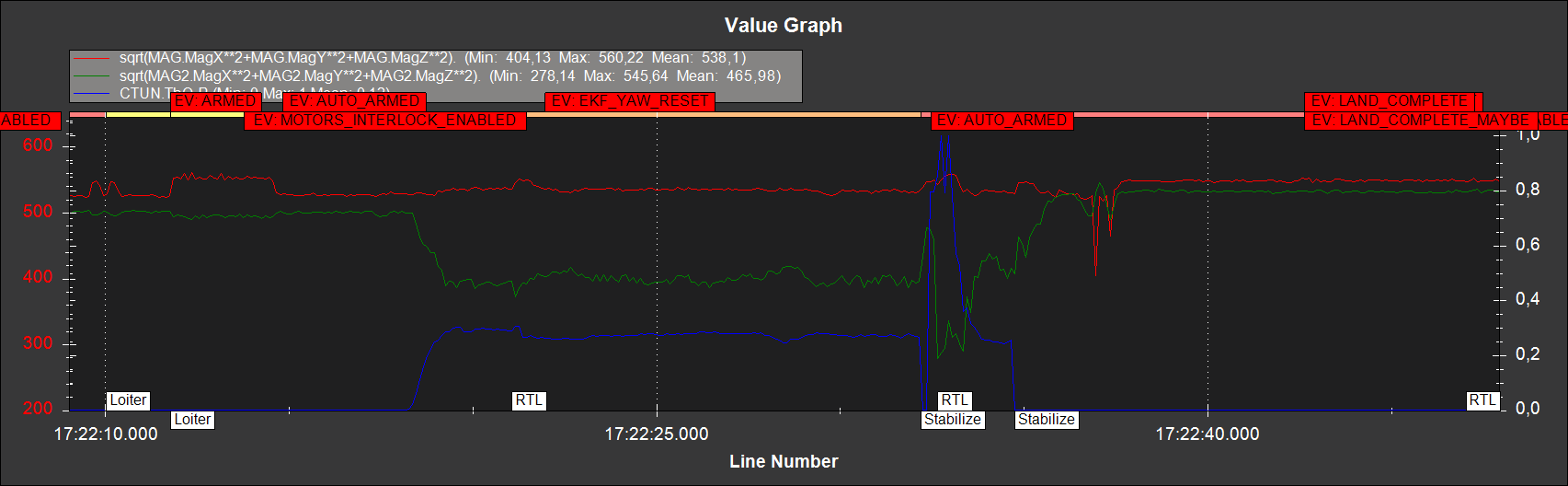
At the moment, I can fly the drone in loiter and stabilize mode, but when I attempt to use the RTL mode, it gives a FAILSAFE_EKFINAV-1 error falls to the ground. Any help pointing me in the correct direction is much appreciated. Interestingly, the altitude goes into the negatives when this crash happens:
Hi, I just had time to view the message. It seemed like you activated Rtl while you were having GPS glitch. And that’s likely the reason.
I do not know why you had GPS glitch yet.
Could you send a photo of your drone and we could see where your GPS is located? Also some insight on the area that you fly.
I could not get the drone to arm Pre-arm inconsistent compasses. I calibrated several times. I disabled the Pixhawk compass and could get it to arm. It flew in loiter mode ok. But dropped out of the sky twice at about 15 ft. Here are the logs.
First of all, you have to configurate your drone properly, I have seen that you are with the default parameters, so you must follow this guide https://ardupilot.org/copter/docs/tuning-process-instructions.html or press ALT+A in Mission Planner and follow the steps. You haven’t got a power module which tells you the voltage and current of the battery, and for me, that is mandatory.
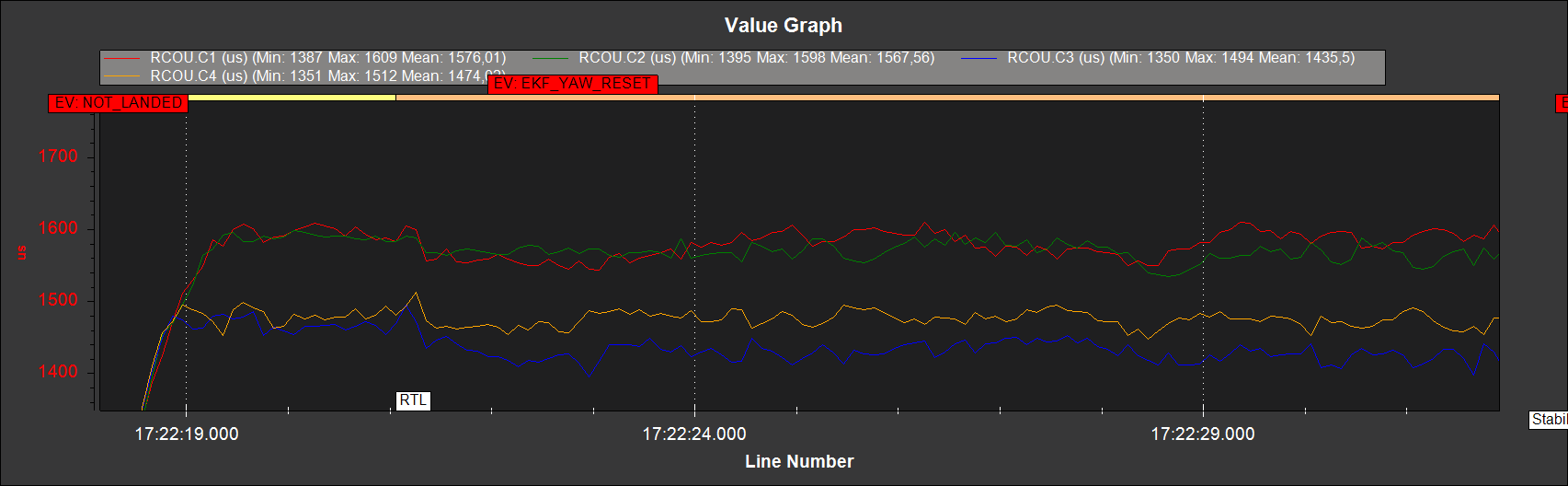
The PWM of your motors is not equal while hovering, so you probably have your motors tilted.
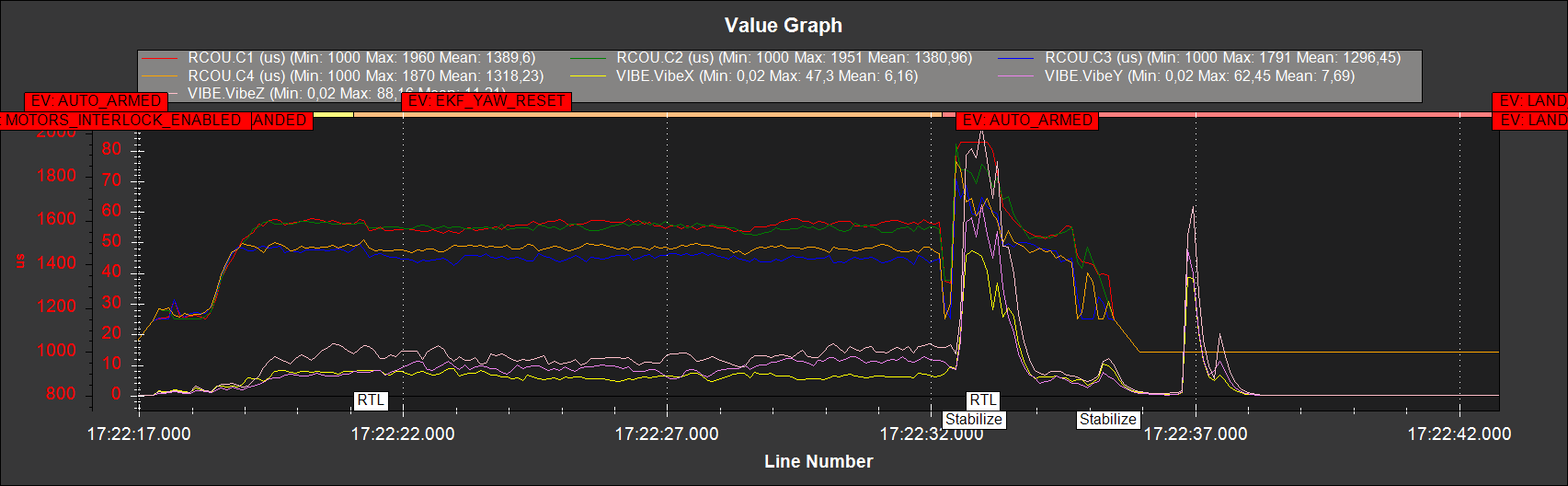
You have problem with vibes, as soon as your motors increase rpm, you have a lot of vibes. Check your motors and propellers, maybe you have to balance them.
And I think that is the problem of your negative altitude, with such high vibes, the IMU cannot estimate the altitude properly. And of course neither the roll and pitch.
The second compass is being interfered by power cables close to your Pixhawk, since it depends on your throttle, so try to move them away. But your first compass is good.
So finally I think that you crashed mainly for the high vibes. After you follow the guide and you solve all the problems, make another flight only hovering in AltHold about 2 or 3 minutes and post that log.
Thanks for the feedback. Quick question the “power management board that I have services the purpose of a power module as well as a power distribution board” per the manual. Do I have some not set right? When I try to do Alt A it pulls up a note BATTERY VOLTAGE MONITORING IS SET AND WORKING
My number motor was acting up so I manually calibrated all the ESCs again. Could that be what was causing the
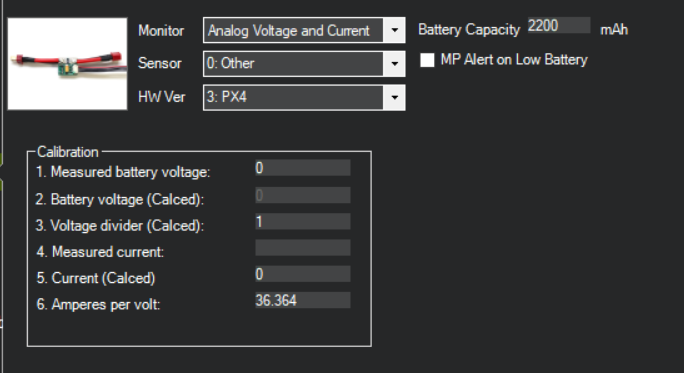
I am having issues with setting up the voltage monitor 1. In the pull down menu for the sensor I don’t have the power module that I am using as a pick. I chose other. I measured the voltage and tried to put it in the measured battery voltage, but it would not let me.
It has been awhile until I could get back to this. My custom build carbon fiber frame broke in half. I think it was contributing to a lot of my vibration issues anyways. I purchased a S500 frame and mounted all my hardware. Including a foam isolation for the Pixhawk. Broke my GPS unit in the crash, but replaced it. I flew it a couple of weeks ago in probably too much wind. It hovered awkwardly for a while in loiter mode and then flew off into the sunset into a tree. Attached is my latest attempt.
The vibrations are bad and I cant make much sense of the motor outputs…
It looks like you might benefit from adding a bit of dummy payload since hover throttle is reasonably low and motors are hitting minimums - mainly due to the bad oscillations.
Vibrations are the issue though. Dont over-dampen the flight controller though, see if you can fix whatever is causing the vibrations.
Typical causes are motor and prop balance, wires pulled tight against the flight controller, loose wires or parts vibrating on the frame.
Trying to fix the vibrations issue. However, now I can not even get the Pixhawk 4 to work.
The B/E just keeps blinking red. I went through all the set up again, but I cannot find anything that it is missing. I can not activate the hardware switch.