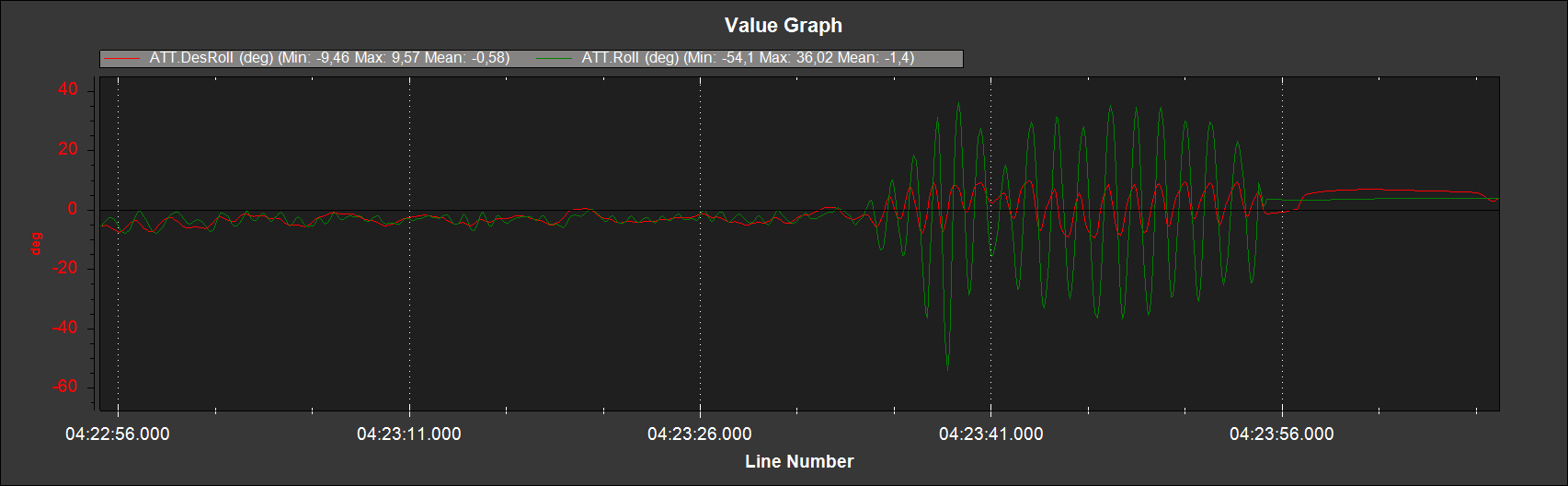
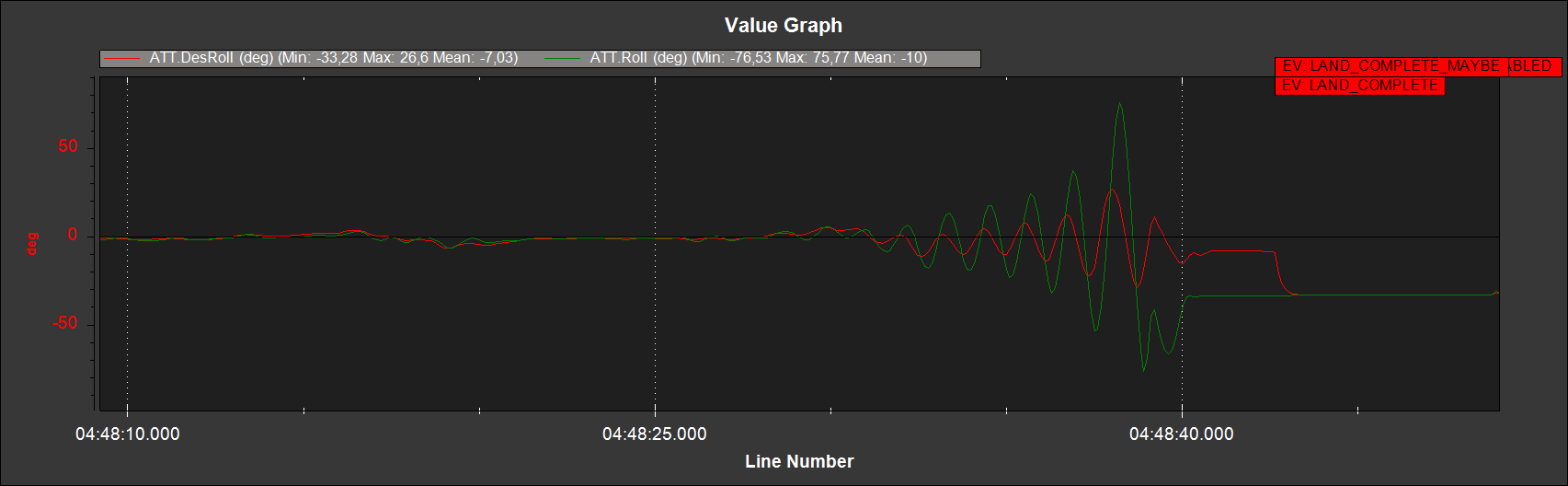
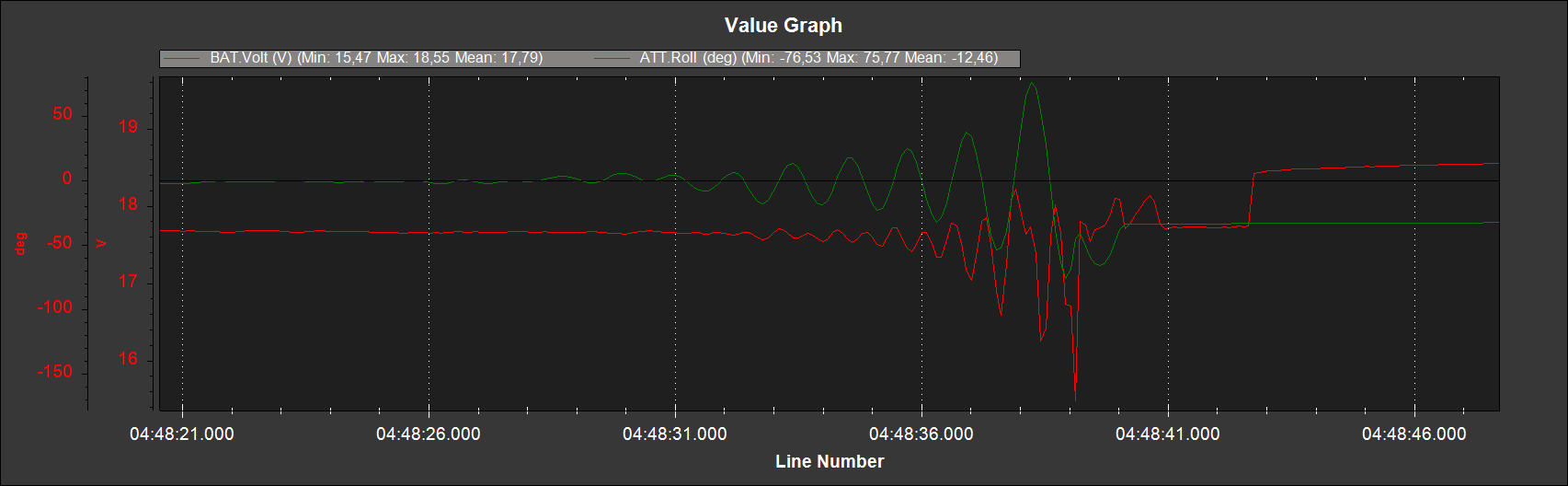
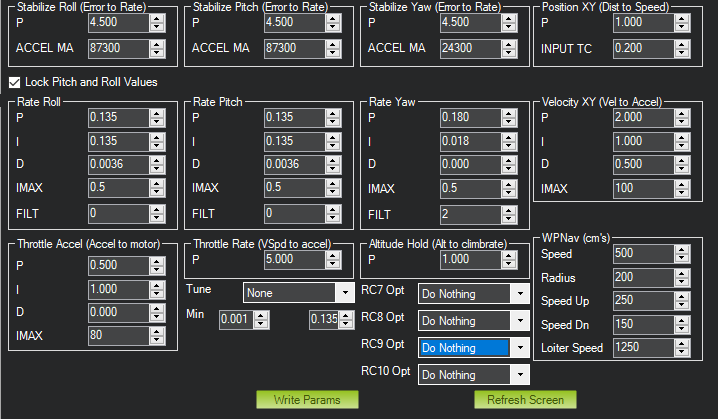
Hello! What I can see in the logs is that your drone is very poorly tuned, you are with the defaults PID and at some point the drone became unstable. Have you follow all the tuning instructions?
The tuning instructions mentioned by @amilcarlucas note that the copter needs to have a reasonably good tune before you attempt the autotune. Thus you’ll need to google the instructions and do all of the steps mentioned in those instructions before you can use autotune.
Also, it looks like you haven’t done ESC calibration. That and the other calibrations (accel, gyro, etc) can make the drone very unstable if it hasn’t been done, and needs to be done before tuning.
Hello All, i did reset all parameters to its factory setting, calibrated esc,radio,compass i mean did all.
Then tried to test it and it did crash again. Sharing syslog, Can expert help me to analyze cause of crash?
You must follow the guide and configure all params, it doesn’t matter that in the past didn’t solve your problem. Also you can press ALT+A in Mission Planner and follow the steps.
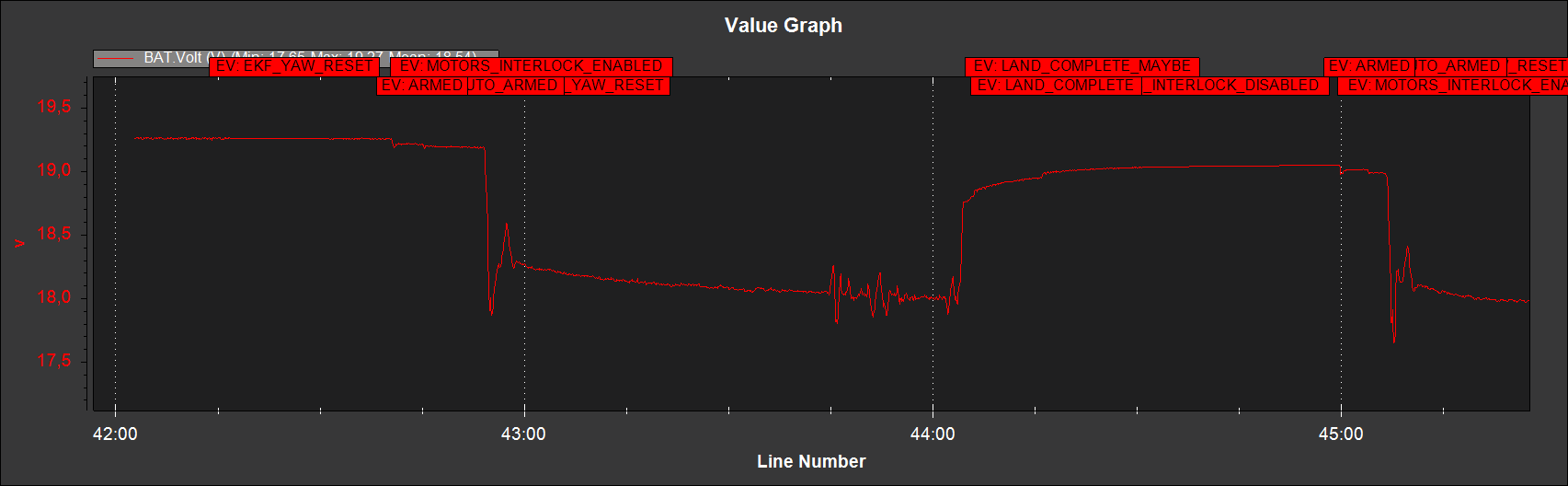
About your battery, when the copter started to wobble, the battery “followed” the movements with a difference of about 2V and that is a sympton that something is wrong, maybe your cells cannot supply all the necessary current or you have bad solders that increase the total resistance.
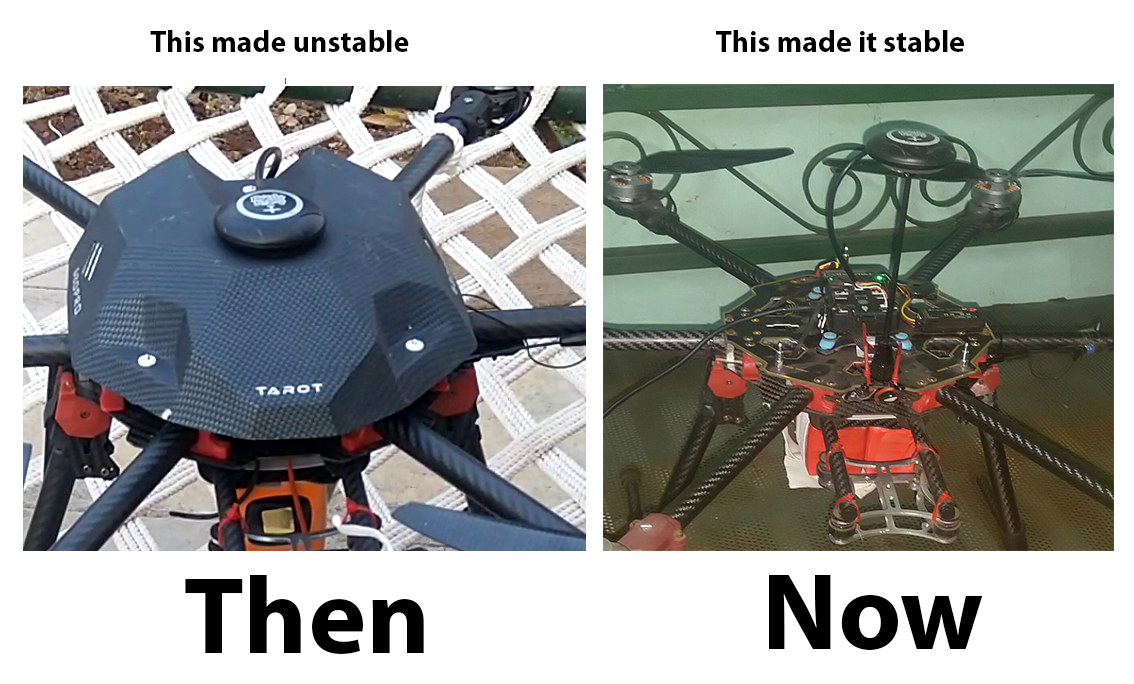
Thanks all, finally I could auto-tune my Tarot 680 pro.
Surprisingly, auto tune did not change PID values, I mean values before auto tune remains same.
Take off and fly in Loiter to ensure everything is working OK, switch to Autotune mode.
Once the twitching is finished DO NOT switch to any other mode, just guide the aircraft back to land and disarm.
Wait a few seconds, switch to another mode such as AltHold or Loiter and test fly.