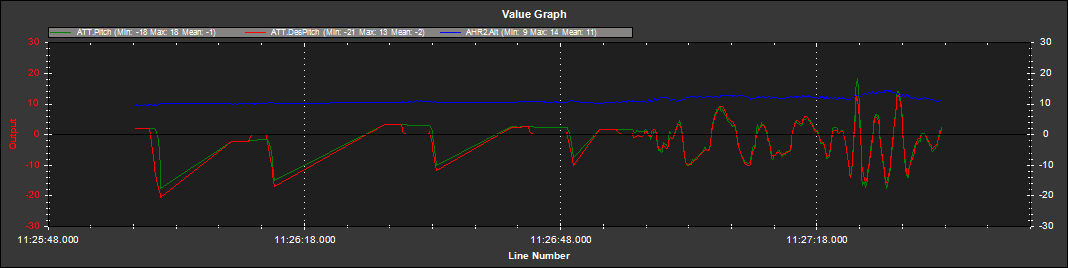
I crashed from 150ft in the air, I switch disarmed it by mistake (I have to decide on a safer way to set up disarming from now on). Now when I take off, both in acro and loiter, the drone pitches forward. The des_pitch shows that the fc is commanding it to pitch forward, and the accelerometer is reading that forward pitch correctly. What could this be? Thanks!
I couldnt access that log file, but check your RCin values, in case arducopter thinks it’s commanded to pitch that way. Or check on the RC Calibration page in Mission Planner - you’ll be able to see the green bars move with RC sticks and switches.
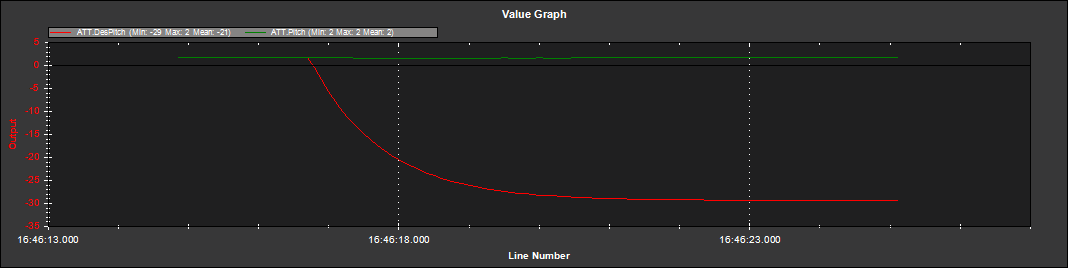
I think during this flight I changed pitch channel to correct for it, but the 1382 seems consistently steady, which is not how I held my stick. I’ll double check this tomorrow but thanks so much for the heads up!
I crashed the drone and went into the woods with the transmitter in order to manually make it beep (gotta set up that beacon!). In this whole process I must have pressed the pitch trim and messed it all up. Drone is up and flying again, thanks man! I’ve got to make a troubleshooting guide… testing inputs should be step 1.