When drone went to start the auto mission so after triggering the auto swirch the drone took altitude upto 8mts and crashed into a three.
- Pos Hold is outdated use loiter instead
- What were you doing prior to takeoff around 15:22 UTC (probably 20:52 local)?
For context:
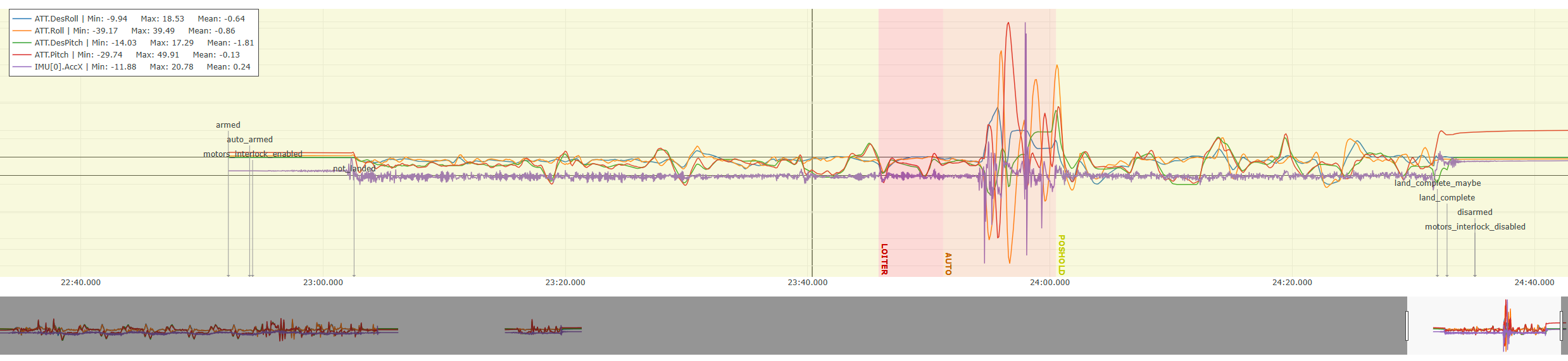
To me it looks like auto takeoff from outside of the designated area leading to navigation through obstacles not known to the flight controller.
Yes it was an pilot error to use POSHOLD instead LOITER and for the correction the drone was flying at 12:15pm IST please not this