My build is a hexacopter with Tarot 680 Pro frame
FC: Pixhawk 4 Aluminum Case
GPS: Holybro Neo M8N
Motor: Sunnysky V4008 KV380
ESC: T-Motor F35A-32bit 3-6S
Battery: 6S 16000 mAh
First flight was indoor, this flight I just want to check that my copter will be able to fly. It took off fine, everything went well. I’ve flown it in ALTHLD. There are no warning on any EKF. Vibration is fine too. It was a short flight. Just take off and hover. Everything is fine.
Crashed flight:
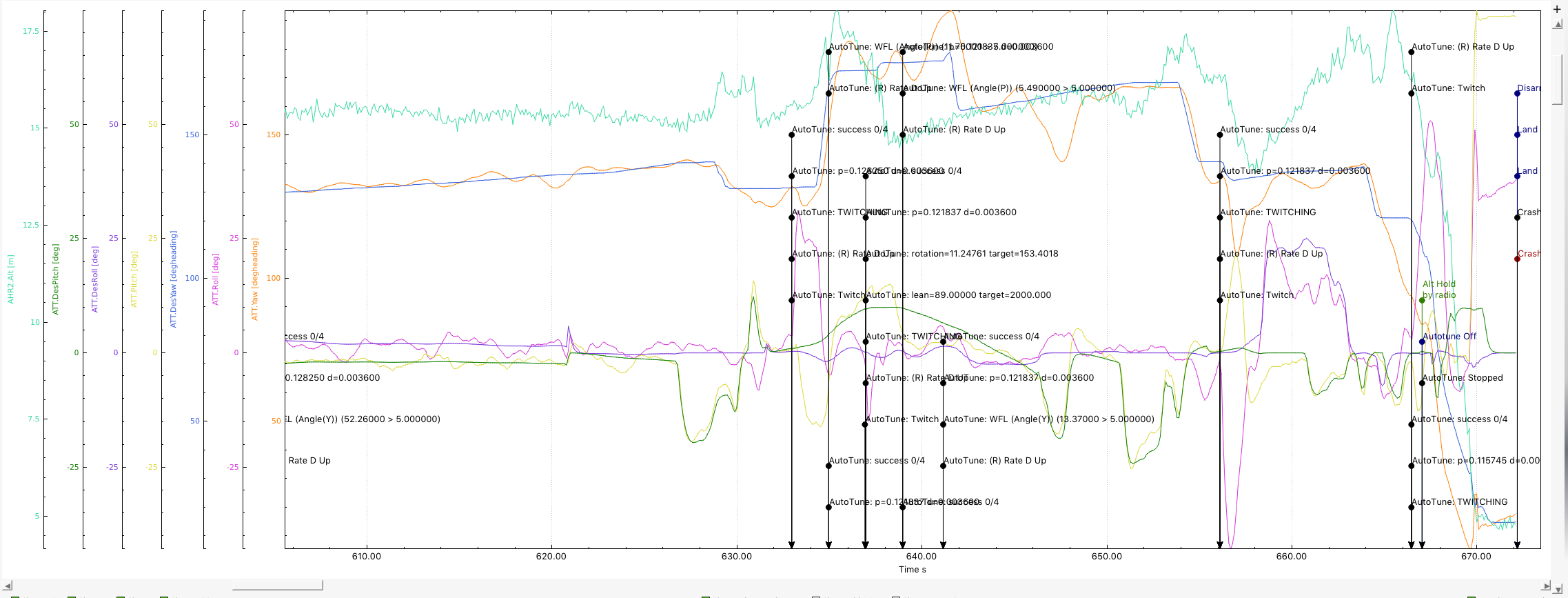
The second flight, I flew it outdoor to autotune. I took off in ALTHLD flew it for a while and switch to Loiter, flew it for a while. I felt that the copter yaw without my command, but it is before tuning, it is not that uncommon I guess and it is still controllable. So, I started the autotune. I set it to tune all 3 axis.
The copter stayed still after I switched to autotune, so I tried to nudge the roll stick to give some input. Then, the autotune started I think that it started to tune yaw axis (from what I felt and saw).
After a short while, copter started to hard roll, but it is in autotune. So, I am not sure whether it is because of the autotune or something is wrong. I didn’t do anything. After that, the copter made a very hard roll, lose a lot of altitude and slowly spin. I am pretty sure that there is something wrong here. I tried to bring it back and land, but the copter loses altitude fast. I push the throttle to the max but it doesn’t seems to help. The copter descended and crashed in a dry rice paddy, but did not suffer any damage. Not even a scratch on the props.
From the log:
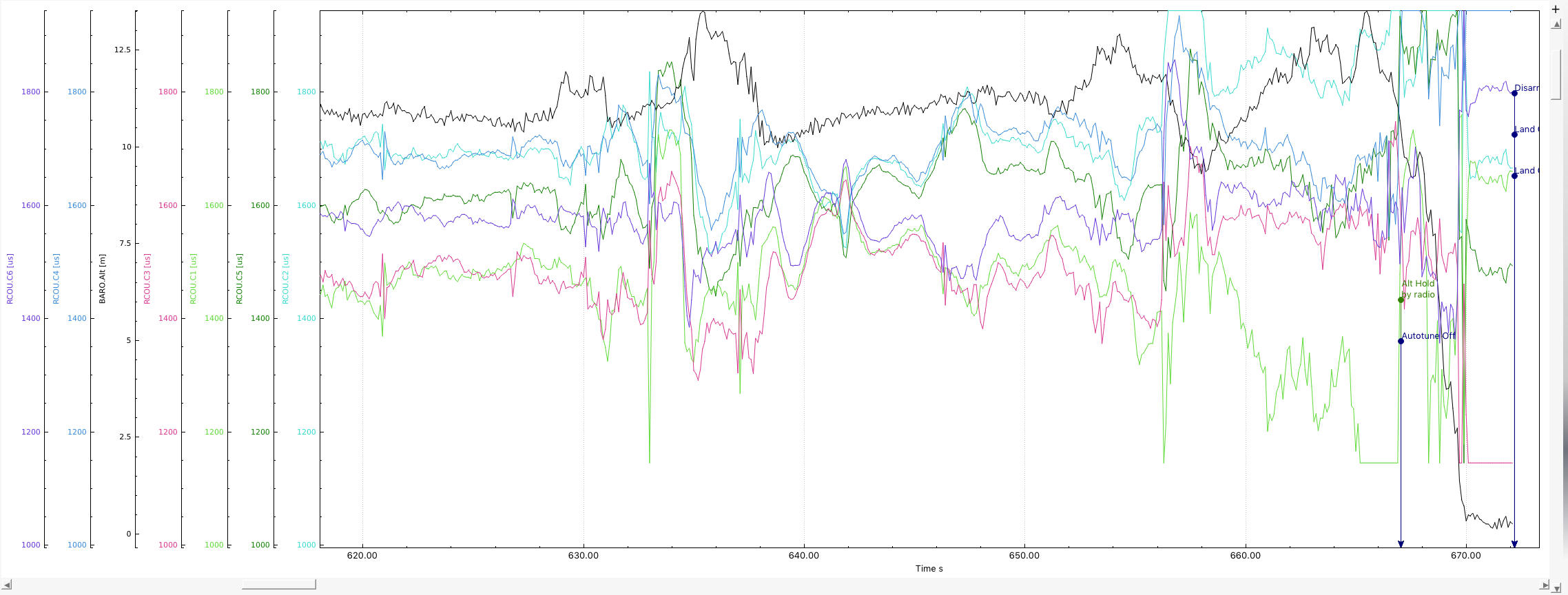
After I viewed the log, I saw that CW and CCW motors PWM output are diverged into 2 groups. This should be from one or more motors are not properly leveled with others. After inspection on the copter and I can clearly see one of the motor is off-leveled. However, this shouldn’t causes the crash or a sudden hard roll. Some of my other copter has the same diverged PWM issue but it still flies nicely.
There is one weird thing though, motor 1 and 2 PWM diverged a lot near the crash causing the copter to spin. I don’t know why.
My question still lies: what causes the crash?
I can’t think of anything, but ESC or motors, but I have used a lot of the same model of motors in my previous built without any problem, but this is a new ESC that I wanted to tryout.
Any idea where should I look or try or any advice will be highly appreciated.
Telemetry log here: https://drive.google.com/file/d/1iIlTeLUivV2Ajv3YxPHxA4gTADvi0_Hk/view?usp=sharing
BIN log here: https://drive.google.com/open?id=1cF7wpdXy0tpc1X9BqqWGSu7pptKIQq15