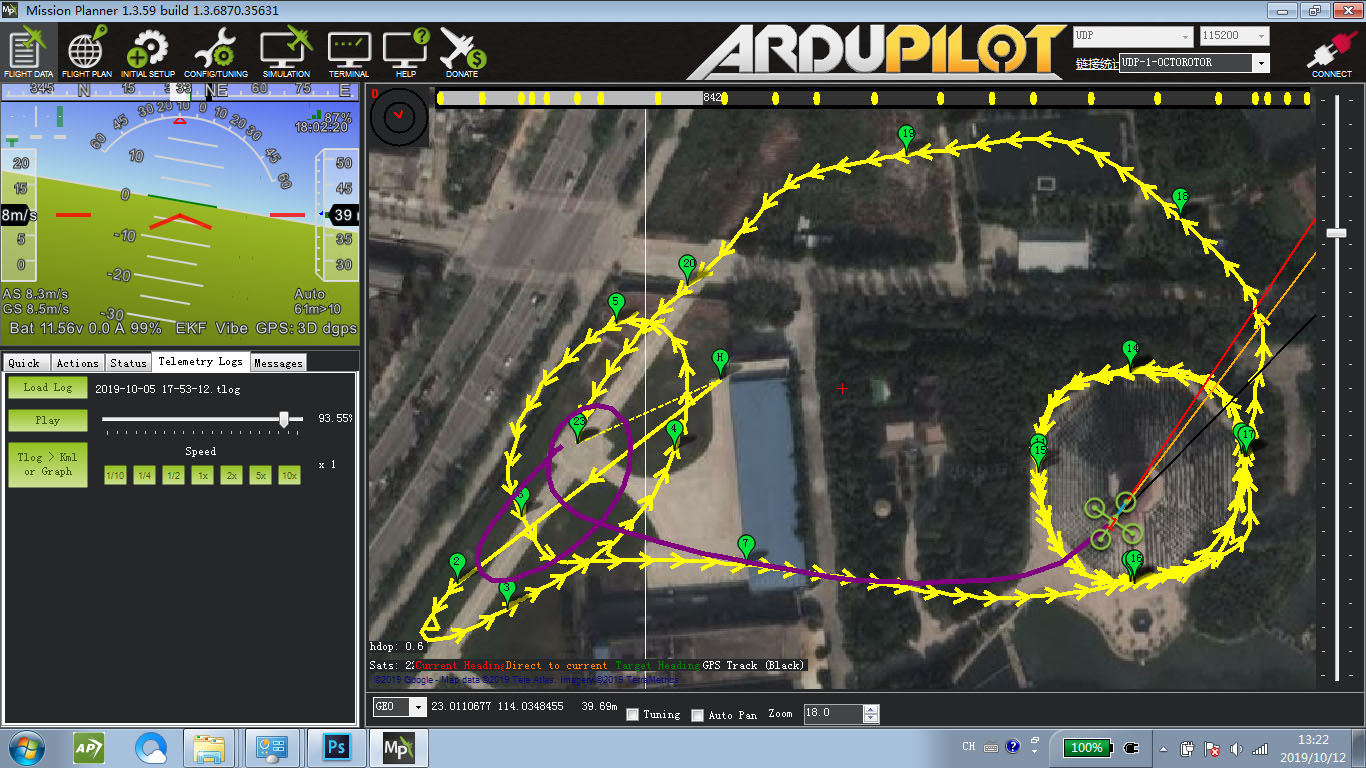
This is the telemetry log :telemetry log
This is the SD card log hit the tower
I want to know why? The hdop was 0.6!
The actual flight path of purple was far from the yellow??? and it crashed into the tower in the center of the yellow circle. Sorry for my poor English.
Thanks you all!
Can you provide dataflash log(log from SD card on autopilot)?
Hi,
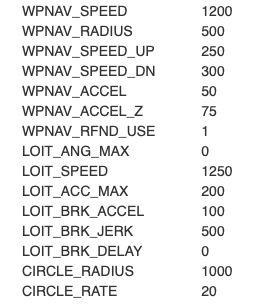
From parameter read, your WPNAV_SPEED is quite high, 1200 (12m/s). Default is 500 (5m/s). WPNAV_RADIUS is 500 (5m), default is 200.
When we combine speed, radius and weight-inertia of your OctoQuad, we can expect such behaviour (shortening the corners).
Your Mission planner version is quite old (1.3.59) versus actual (1.3.68).
Small WPNAV_ACCEL and large WPNAV_SPEED can cause this kind of behavior. If you need to be precise then use normal waypoints and add a 1 sec delay for each waypoints.
What I have found interesting is if you add a 1 second delay to Spline Waypoints it flies them as regular Waypoints stopping for the delay. It doesn’t actually fly a splined route. Set the delays back to zero and it does.At least in SITL this is what happens.
How can we find default value? How you can analysis?
Thanks
In fact, ten meters of accuracy was enough for me,but It deviated from scheduled course over 20m
I set the small WPNAV_ACCEL because the take off weight of the copter was over 100KG
If I add the delay time, it will waste a lot of power druing in the process of acceleration and deceleration, are there any other solutions?Next time I’ll try to test it for times
Thank you very much ,Eosbandi