Hi guys,
after a build and the initial tests, I was having a wobbling with an AtomRC Dolphin, looking the forum I found some configurations I should change - as SMAXX for roll and pitch.
After rereading the autotune docs, I change some parameters related to agile aircrafts - As schee_loop and some others.
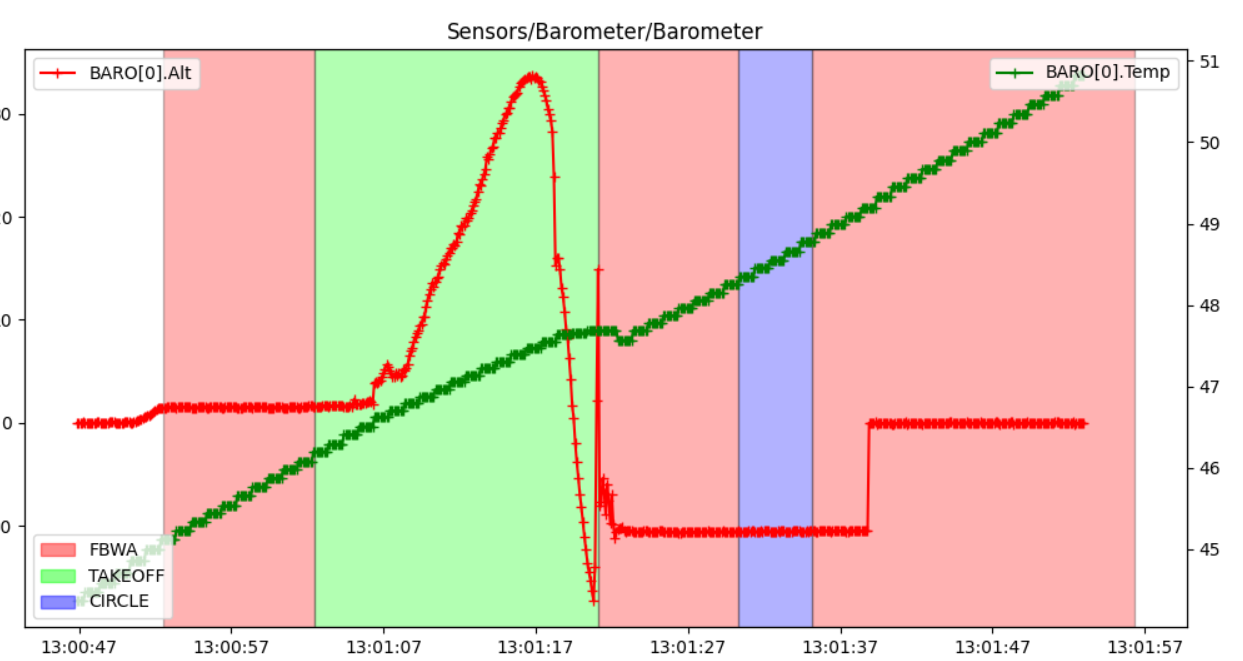
I changed the TKOFF_THR_MAX to 80%. Launching the wing, the TKOFF_ALT was not respected and with 30 metters - instead the 50 configured, the plane done a curve and changed upside down and crashed in the ground - at more the 130km/h speed - I believe if the plane was at least the 50 metters altitude the plane would do the roll and recovery itself, but at 30 metters there was no altitude enought for that.
The main question I have is, why the airplane started the roll without reaching the target Altitude(why 30 instead the 50 metters ?
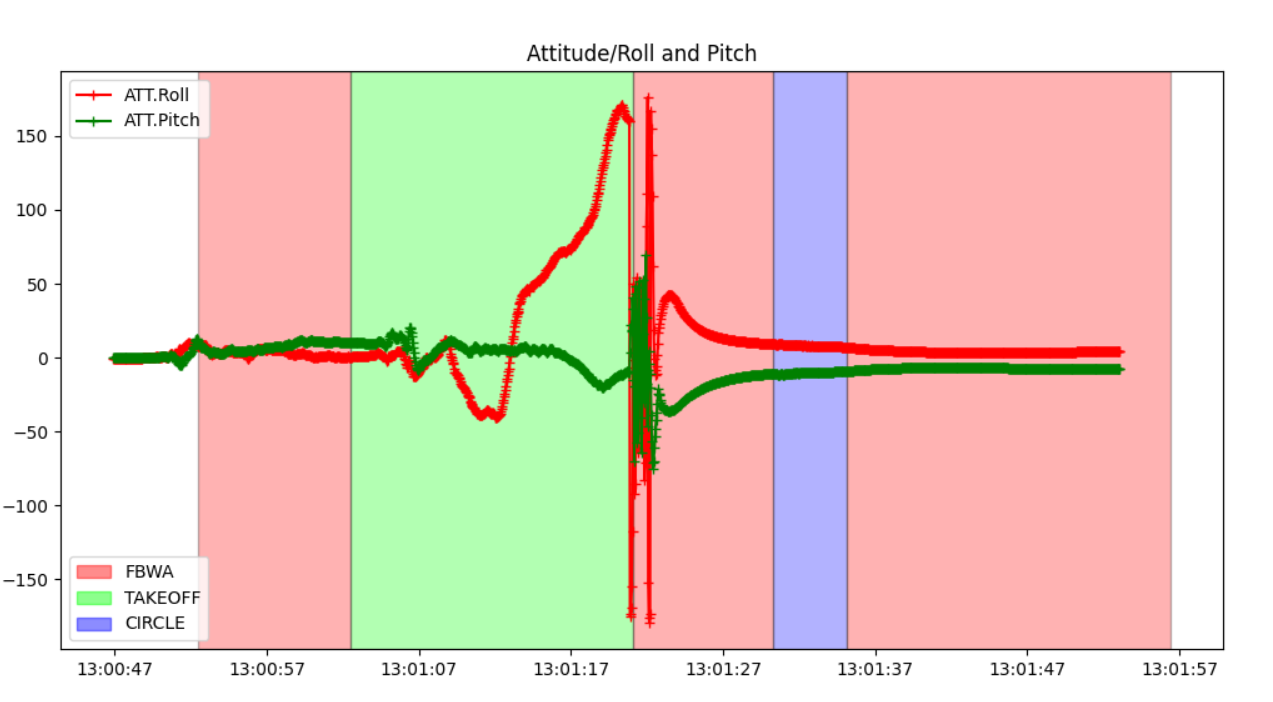
The second one is why the plane simply done this roll and became inverted.
The logs can be found at 2023-12-15 13-00-47.bin - Google Drive
thanks for any help