Hi,
With our Ardupilot quadcopter version 4.3 we made a crash. After we took off we lost rc communication and then normally flight mode became failsafe. After that somehow we lost control.
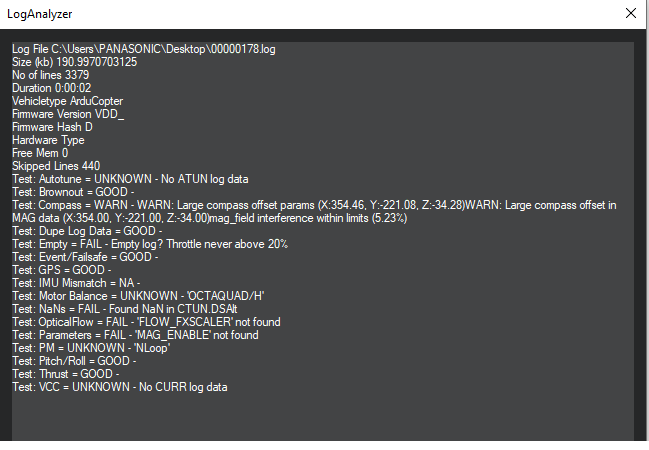
I shared logs (.bin) and imported log files to auto-analysis but couldn’t address the real problem.
Can anyone help to understand the results? What are we missing & why the autopilot couldn’t control quadcopter?
Thanks.
There is no battery voltage or current in the log file. A good idea to make sure the battery monitoring is setup for both current and voltage.
Setup notch filtering.
The tuning parameters here are strange. Typically ATC_RAT_xxx_P and ATC_RAT_xxx_I are the same. There are significant enough oscillations in both pitch and roll axis to validate this tuning is not good and should be re-done according to the wiki.