can someone please take a look at the log file? After the takeoff in Poshold, the copter flew off to the right at an extreme angle. Could that have been a GPS glitch? The log file doesn’t show the error message until after the crash, when the copter was on his back…
Thank you very much!
Arducopter 3.6.12
Hexa Frame, 12S with T-Motor MN701 135KV and 24" blades2020-04-28 12-55-08.bin (775.0 KB)
Did you check the motor positions and orientation. I know it is a rookie error, but log seems to point on that.
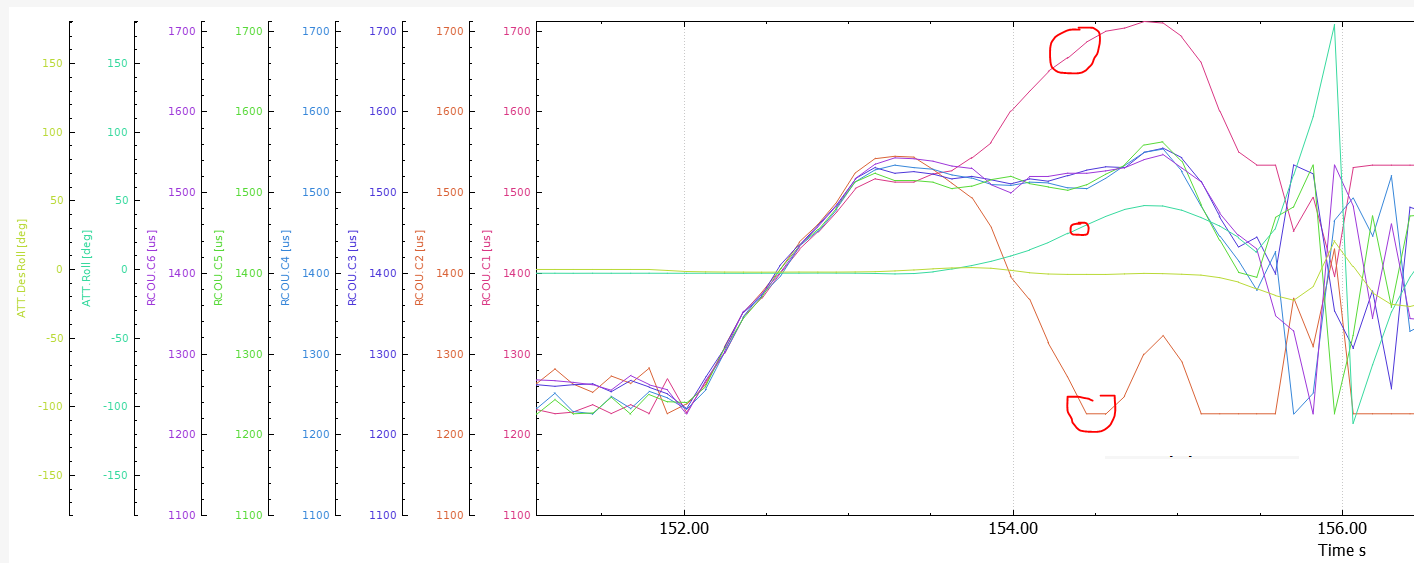
Motor1 (right) went up, and motor2 (left) went down, however copter rolled right… (positive roll right, negative left)
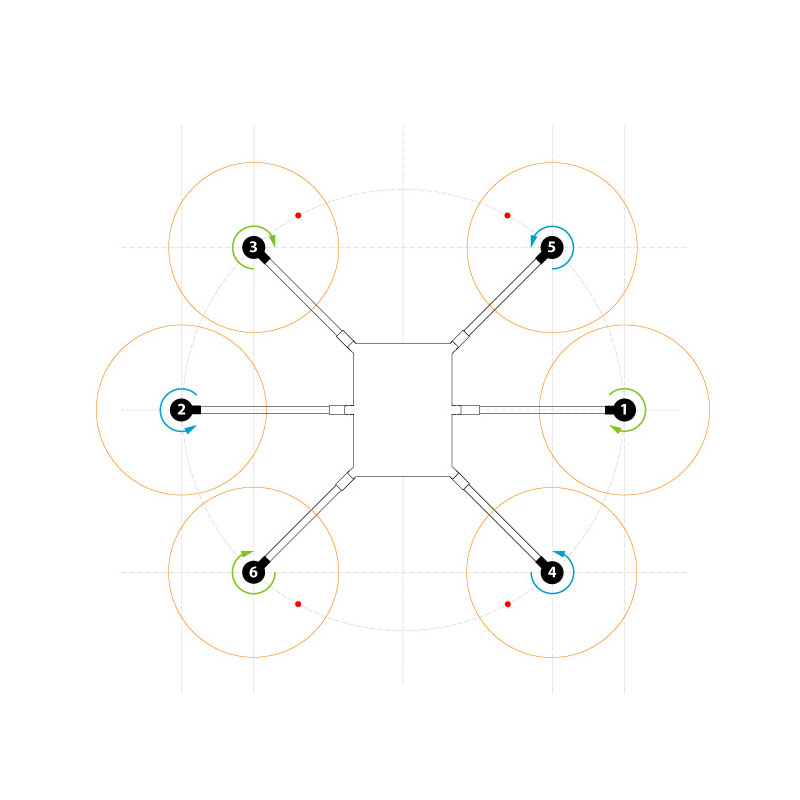
@Eosbandi That was my first thought too, but we had done a motor test before, the order of the motors and the direction of rotation was correct. The frame is a converted Hexa H (middle arms longer, outer arms shorter), so the distances between the front two motors and the rear two are a bit bigger than with a Hexa. I will upload a sketch. But I cannot imagine that this is the reason…
so what else?
Did you check the roll direction of your TX?
What about the mounting direction of the fc?
Or maybe any rotation parameter for the fc is wrong?
@R.S.T I have also checked the direction of movement in MissionPlanner HUD. The HUD shows everything correctly. Also all RC Stick movements in the MissionPlanner calibration screen are correct. The FC is installed facing forward, the Here2/compass is turned 90° to the left, which should correspond to COMPASS_ORIENT = 6 (270° to right). I have no idea how this happens. I am at a loss…
Although I think it need a different motor mixer, but it should fly with a standard hexa X mixer as well.
To check basics, do a hand test. Get some protective gear and one (or based on the size of your copter two) of you keep the copter above head (I know it is dangerous but this is the easiest way to asses basic controllability). Switch to stabilize and give a small!!! throttle. Check resistance against movement, then check RC control movement. If it seems OK, then you can move forward to test fly in AltHold…
Many thanks for your hints!
It was indeed the case that a so-called “redundancy board” was responsible for the accident. The board is mandatory in Austria and causes that in case of an inclination of the copter by more than 60° the system switches to a secondary flight controller. This board had a short circuit between PWM1 and PWM2, so that they were connected in the same way. Strange only that I did not notice this during the motor test. The board and the second CubeBlack has now been rebuilt and the Copter flies perfectly again.