Hi everyone.
I had a very bad crash and I have no idea what’s wrong.
Can anyone help me, please?
I’m using ArduCopter 4.1.4 and my setup is octoquad X8.
Here is my log:
Quite the mess in this flight. 1st you had a Vibration Fasilsafe triggering Vibration Compensation then Motor 1 and 5 appear to have lost thrust. 1 was commanded to max and 5 was close to it.
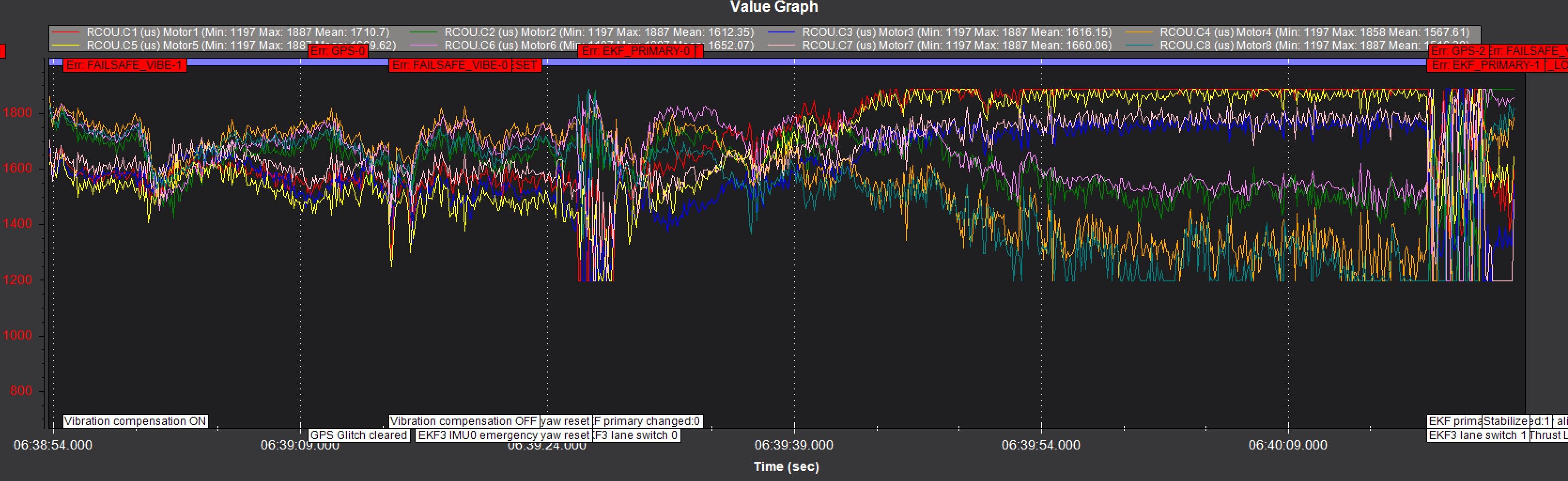
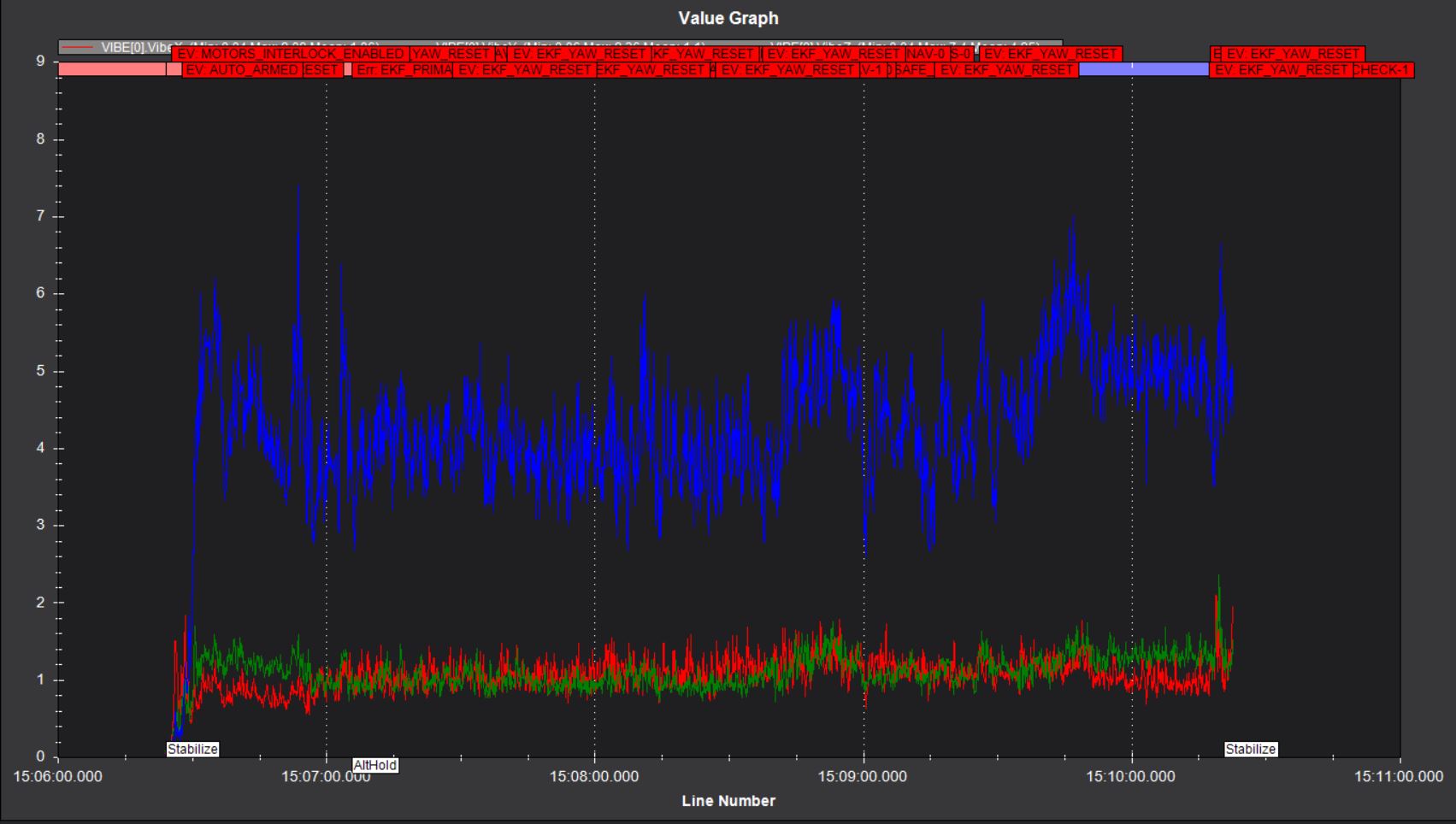
But the vibration value was less than 7 m/s^2 all the way. As mentioned in Ardupilot’s Docs Vibration levels below 30m/s/s are normally acceptable. Also, after this error, the mode was changed to “Stabilize”.
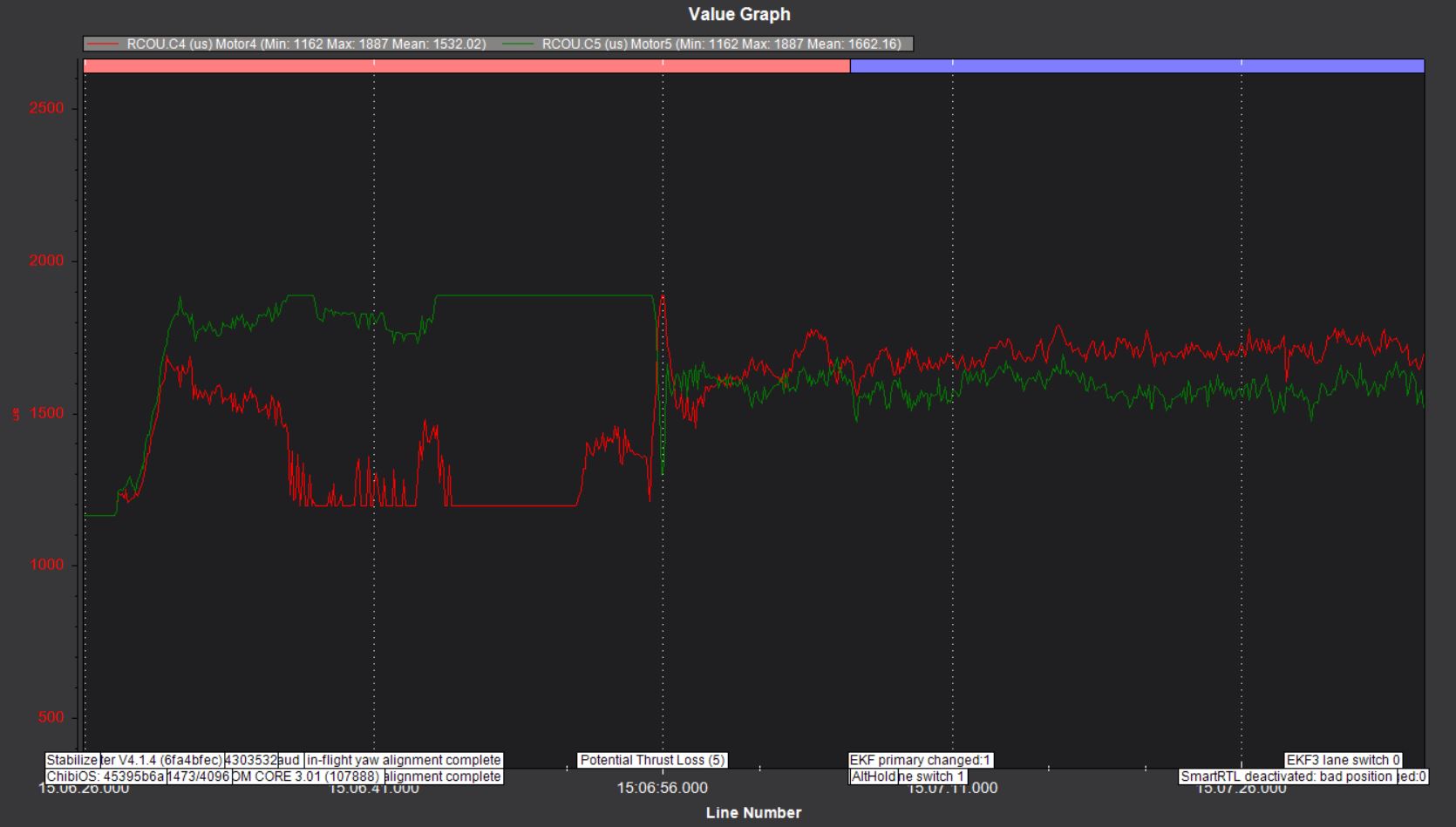
At the beginning of the flight, the “Thrust loss” error is also observed, but the vehicle doesn’t fall.
what’s wrong?
Could it be a hardware problem and the motors lost their efficiency during the flight?
Or maybe the problem is the battery?
Of course, this drone flew for 8 minutes with the same battery before.
Read the Wiki about the Vibration Failsafe. It’s not all about vibration. That can contribute but so can a GPS Glitch or other issues causing positional error.
Vibe FS
Could this cause the vehicle to crash?
In stabilize mode, the copter should have preserved itself, but it did not. Why?
Because there was a lack of thrust to fly. 2 motors show thrust loss and 2 opposing motors drop to attempt to stabilize attitude. Then down it goes.
It is strange that at the beginning of the flight The fourth engine was working at the lowest speed and The fifth engine was working at the highest speed.
Probably the problem is with these motors. Is not it?
Why did this problem happen all of a sudden?
Could the motors overheat and fail? Because when it fell, it seemed that the front motors had no power and were out of order.
RC outputs are not speed, they are PWM command signals. Loss of thrust will cause these to increase…
Sure they can overheat. Do you have a simple hover flight log? Like would have been used to collect data for Notch Filter configuration.
I don’t have a simple hover flight log, but the vehicle has the slightest movement in the following log:
Does anyone have any other ideas for the cause of the crash?
@rmackay9
@amilcarlucas
Overheating of the motor can reduce its efficiency?
When it was falling, it appeared that the front motors had stopped
What is the main problem?
Does anyone have an idea for this?
Dave already told you the answer
Thank you Dave.
But I did not understand the possible reason.
Was there a problem with the motors during the flight?
Overheating of the motor can reduce its efficiency?
Can vibration compensation be one of the causes of crash?
thank you for your attention.
It’s not always clear from the log what causes a lack of thrust. Motor, ESC, Prop failure.
Dave, shouldn’t engines 2 and 6 increase the PWM to try to compensate for the loss of thrust of engines 1 and 5? And to fix the yaw problem 3 and 7 as well?
Did you take off with payload close to maximum weight? The controller easily peaks PWM. After the fall, did you identify any motor with burnt coils or burnt smell?