@JDANILOM mentioned a good point. In several previous cases, the Octocopter maintained its stability after losing one of the motors (due to the burning of the ESC).
Buy why it couldn’t in this test?
No,I didn’t. My copter tooks off at 50% thrust.
My flight time with this drone was about 6 min.
After the fall, I checked all the motors and there were no signs of burn.
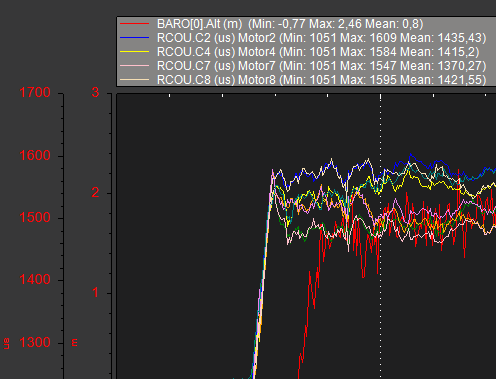
I also have an octa and note in the graph below that without extra payload the maximum PWM pulse is no more than 1610. Of course it is not a rule, even because they are different configurations, but it serves for comparison purposes.
Do you know that in the configuration of two motors per arm, there is an efficiency loss of about 20% in the motors? I am commenting this because you should have considered it in the calculations. I’m insisting on this because without payload the PWM pulse shouldn’t be that high.
Hi guys. I have a question about this crash.
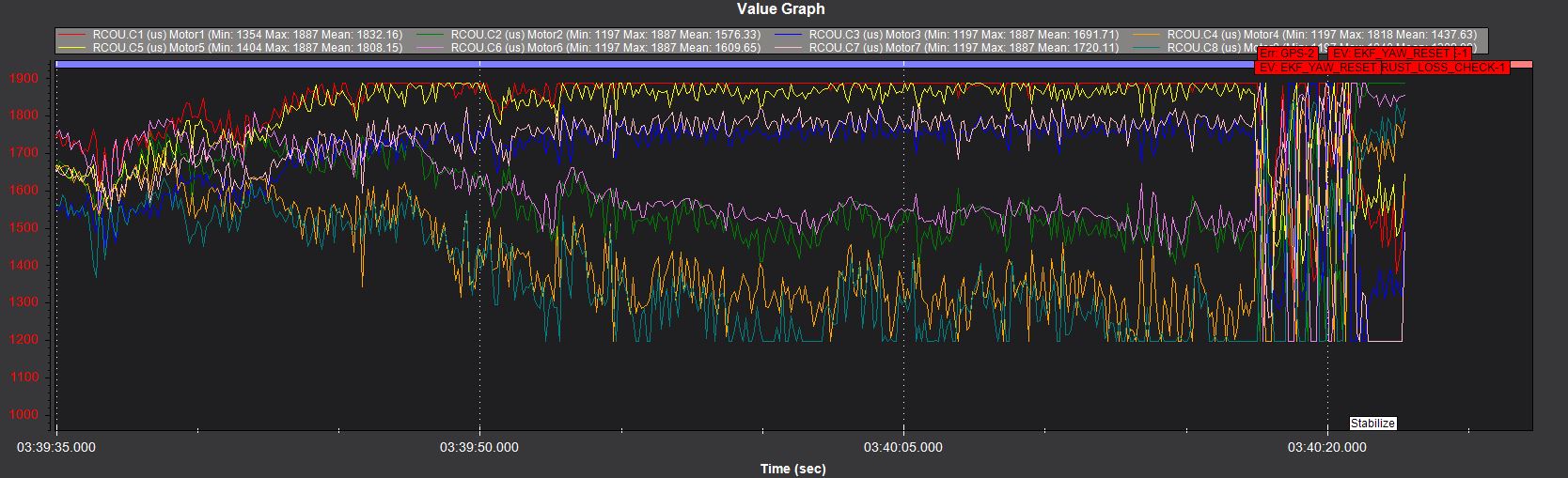
Why didn’t the PWM of engines 2 and 6 increase to compensate for the loss of thrust of engines 1 and 5?
We know that in the structure of the Octocopter, there are two motors in each arm, which increases the safety of the flight. But in this test, after the saturation of engines 1 and 5, the controller did not make any effort to stabilize the vehicle with the help of engines 2 and 6!
I don’t think it’s that simple on an X8. Consider Yaw stabilization. 1&5 (Front CCW) loose thrust so now either 3&7 have to increase (what happened) or some CW motors decrease. Also with 1&5 loosing thrust the front of the craft is lacking thrust so some rear motors have to decrease or 2&6 increase. And then back to the Yaw case. And so on…
1 Like
According to the title you are using ArduCopter 4.1
I think ArduCopter 4.2.1 has better motor power distribution in case of a failure. But I am not sure. too many versions in my head ![]()
I always have a lot of questions… ![]()
Do you use bullet-connectors between motors and ESCs? Solder gives better connection. Bad connection = not enough current. Any other cables that should be soldered?
A friend of mine hade a similar problem some years ago. Flew well many months. Then it started dropping, rotating and crashed. It all started with a vibration in the log, all electronics works fine and are used after that. Something came loose. After that everything is fastened better. Thread lock glue, stripes and double sided tapes, … Nothing can/should get loose.
Much wind?
Motors cools pretty fast, can they handle the power? Specs will say how much current, voltage and power they can handle. But that doesnt mean it can handle both max current and max voltage at the same time with the propellers you are using, the power can go a lot over the limit.
50% for takeoff… is that with the throttle-stick or RCOUT? You should hover at RCOUT 40-60% depending on load and use. Stick and RCOUT are not the same.
Photos of the X8?
What battery do you use? Fresh ones? Internal Resistance OK? Cell-voltage equal before charge?
Do you have cutoff activated on the ESCs (some lower the output a bit, other cut it directly at a point or after they have “informed” you with a pulsating motor-speed or lowering the speed.
Long power cables anywhere (longer than 15-20 cm? Using capacitors?
Are the propellers balanced and centered on the axles?
What are the specs for the motors and ESCs? And what propellers are you using?
DEO Off if you use HobbyWing?
Take off weight with and without load?
6 minutes… what cell-voltage do you have after the battery/batteries have cooled down after a full flight?
And yes, coaxial is less effective than a flat-octa.
Have you done a Autotune?
1 Like
Did you perform the ESC calibration procedure?
Also you have a big battery voltage drop at startup: from 25V to 22V just after take-off, maybe the battery can’t provide the amount of current to the system.
I noticed that the main problem occurs when you reached a speed of 20 m/s and the UAV became uncontrollable. This tells me there may be a battery problem
1 Like
Low-quality bullet connectors are terrifying, and there are tons of them in the market.
Hello everyone.
I have a question about this crash.
Why the following values are observed when falling:
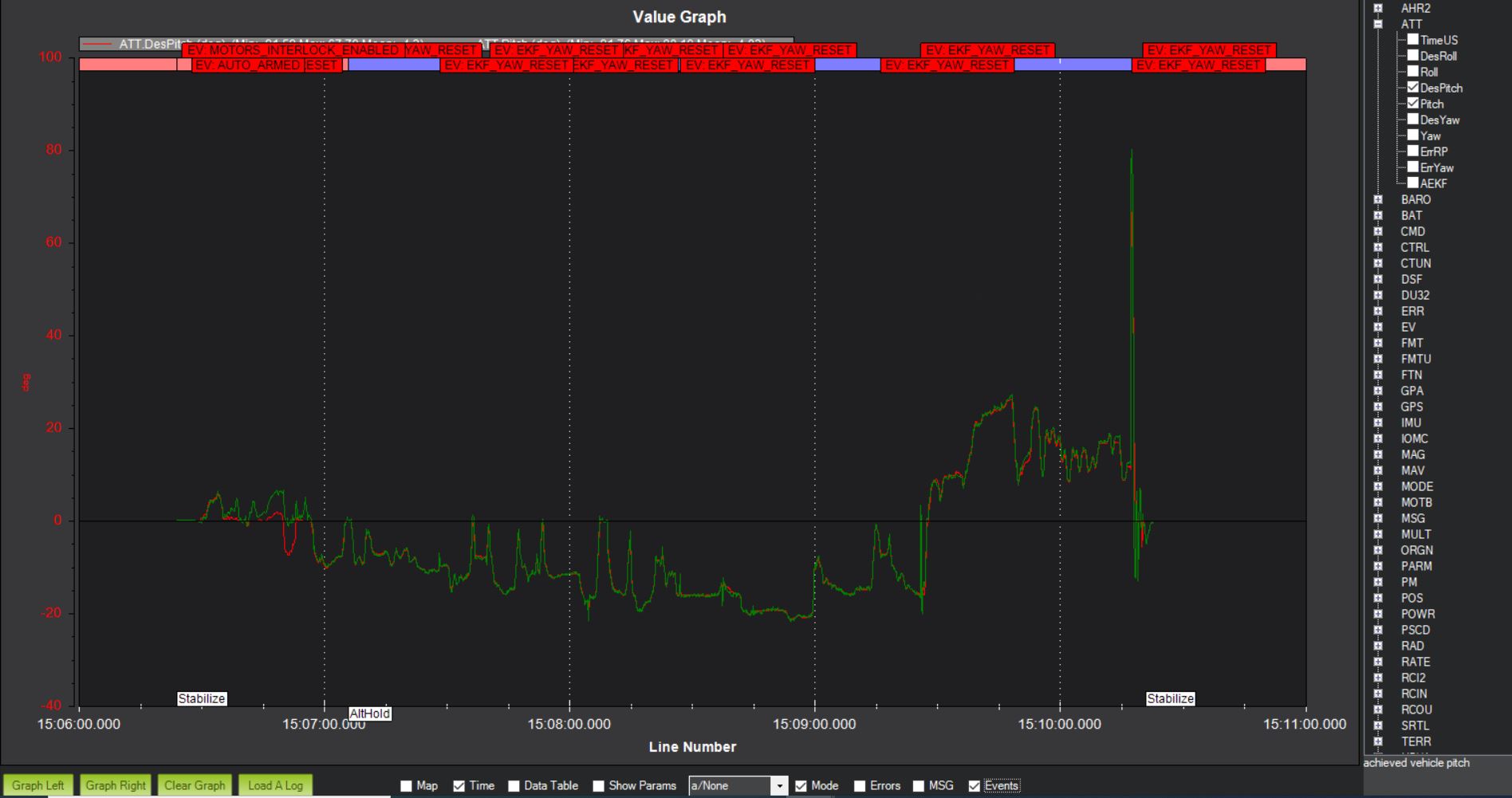
ATT.DesPitch = 65.88 deg
ATT.Pitch = 79.23 deg
AHR2.pitch = 7.6 deg
Why did the autopilot produce such a value (65.88 degrees!) for the desired pitch?
And what is the difference between ATT.Pitch and AHR2.pitch?
Is there another log to review?
Yes, Here is my log:
https://drive.google.com/file/d/1PxH45gp3gUN63Q3G85F5LvRbLov33olv/view?usp=sharing
Yes, I know it but my question is about ATT.DesPitch and its value.
Why the following values are observed when falling:
ATT.DesPitch = 65.88 deg
ATT.Pitch = 79.23 deg
AHR2.pitch = 7.6 deg
Why did the autopilot produce such a value (65.88 degrees!) for the desired pitch?
And what is the difference between ATT.Pitch and AHR2.pitch?
Probably because it had insufficient thrust for Stabilization while it was racing to the ground.
AHR2.pitch=estimated pitch
ATT.pitch=achieved vehicle pitch