I was flying my quad in AUTO using the latest stable version of ArduCopter(3.6.5) , and noticed a few weird interactions. Firstly, the waypoints were not saved correctly by the Quad. I flew first with a mission, and then after some time, I uploaded another mission. But while flying, the quad instead started to fly following a mission which was basically the first mission, with only a change in altitude. I’m not sure how to share the mission, so I will be attaching the screenshots of the mission.
After noticing the quad flying in wrong mission, I switched to LOITER mode to bring the quad back, and it started to dive. It dove, crashed and tipped over onto the GPS. While trying to disarm, it refused to do the same, so i picked the quad up, and it detected a crash and disarmed. I went through the logs and I’m confused. Please help.
Could not see anything specific but I did notice you have no battery monitoring turned on at all.
The flight path issue could be a GCS issue, which one are you using?
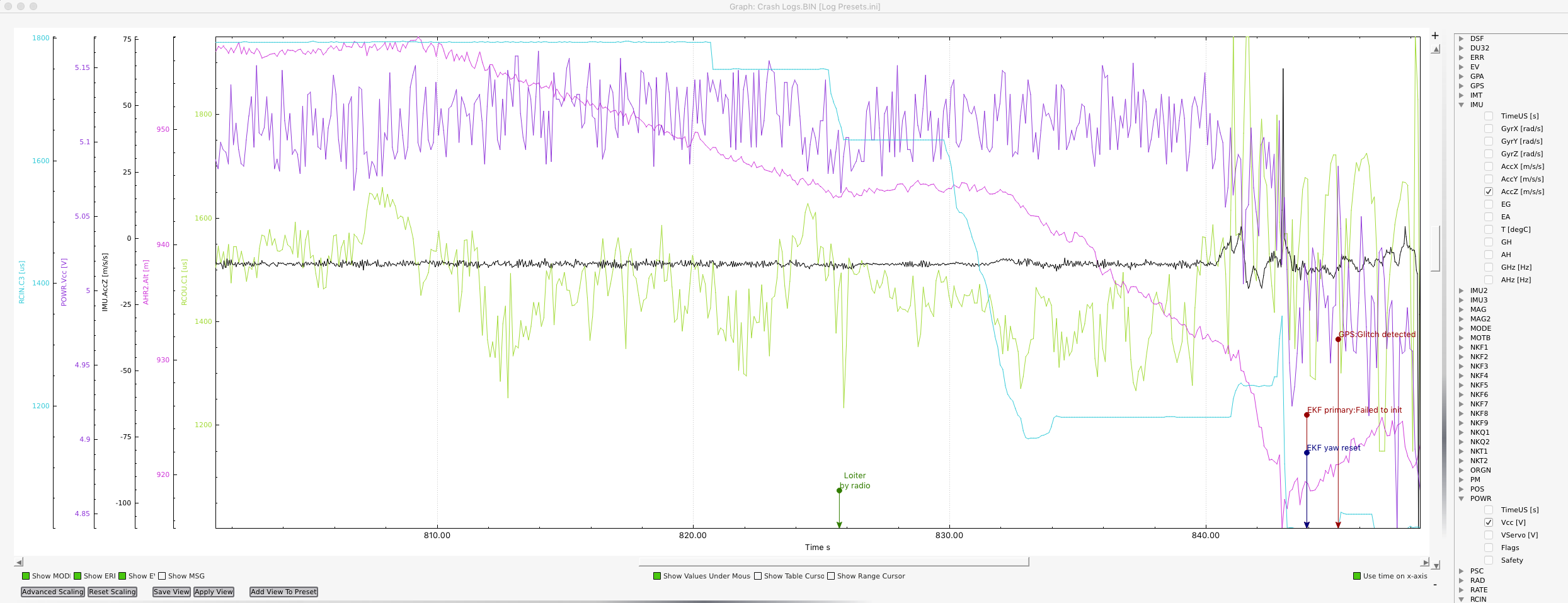
The only thing I noticed is your Vcc starts to drop off at the end after being very constant during the flight.
I would suggest you ran out of battery power.
The GCS which I use is a modified version of Tower in Android. It has never failed me so far. This is the first time it did something like this, where a different plan got uploaded altogether.
As for battery monitoring, I don’t use it because I have different batteries which i use for flying, each of different mAh. Also, I never got the monitor to show the correct value of battery voltage.
I will try to put battery monitoring and check today, after repairing the copter.