Hi there,
our Copter (Octocopter X8, 24" Props, ~12kg, pixhawk4 chibiOS,v. 3.6.9) detected a crash at a height of 70m. Fortunately, the parachute opened and the drone safely went down. The neighbor was not happy with his new jewelry in the tree and we were not happy at all.
As you can see in the picture, the copter tilts to the side in the air, but the Pixhawk doesn’t seem to be fighting against it, the battery simply recovers. Please, how can that be, what happend here?
Thank you quadpack35 for your help! We use a Lidar LW20 and the IR Cam, both with i2C for precision landing, but I can’t image, that this is the cause of the problem…
Please, someone has to have an idea of what might have happened here. We are talking about a 12kg drone, which can be very dangerous. Who tells me that this cannot happen with version> 3.6?
Before the drone crashed, I did a clicknfly. It came down right after the drone changed its heading to the new position. The previous clicknfly’s were executed correctly, everything looked fine… Maybe this gives someone a hint.
How the vertical balance is looks like of this copter ?
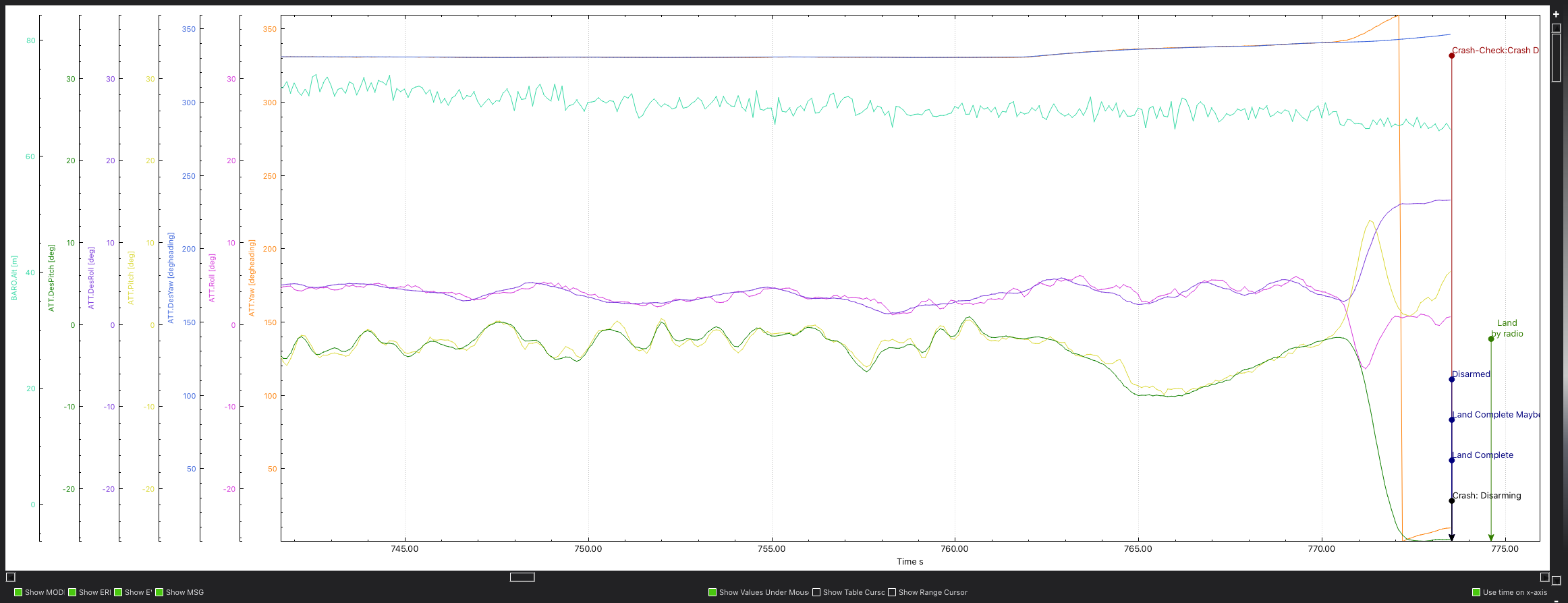
The crash check was totally valid since the desired and actual roll was different by more than 30 degrees for more than 2 seconds.
The question is what caused it ?
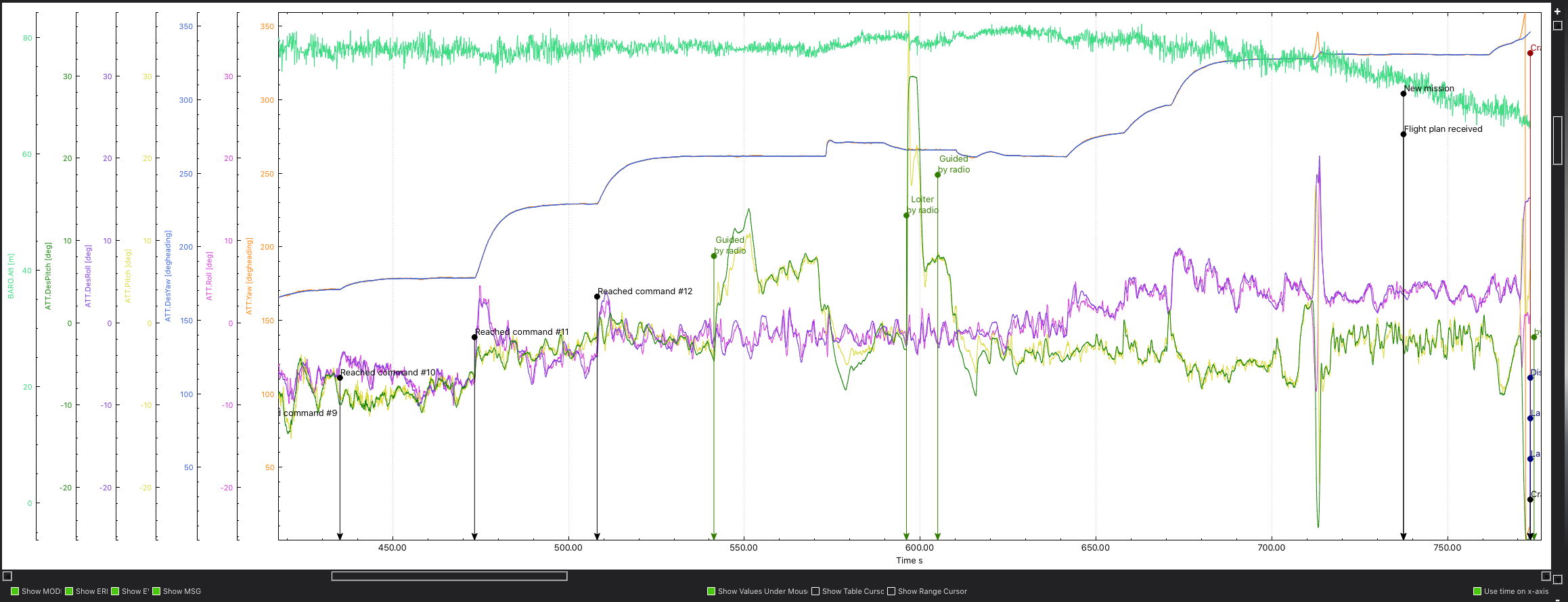
If you look the full flight there were dangerous divergences between desired and actual roll/pitch values a couple of times. The only luck was that it did not take more than two seconds to correct them.
Without seeing the actual craft I would say It is a combination of a suboptimal tuning, high speed flying, wind, and vertical imbalance. But that is just a theory.
As @Eosbandi points out the tune of this copter is way out as is the balance.
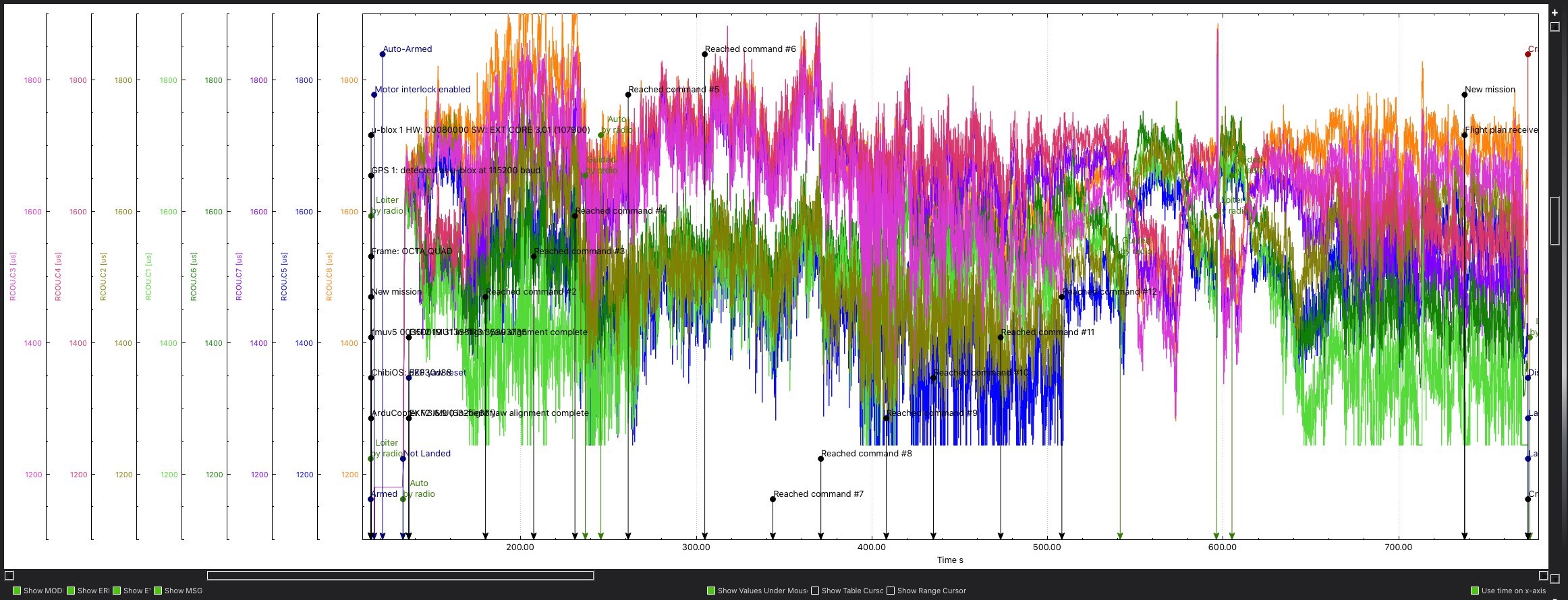
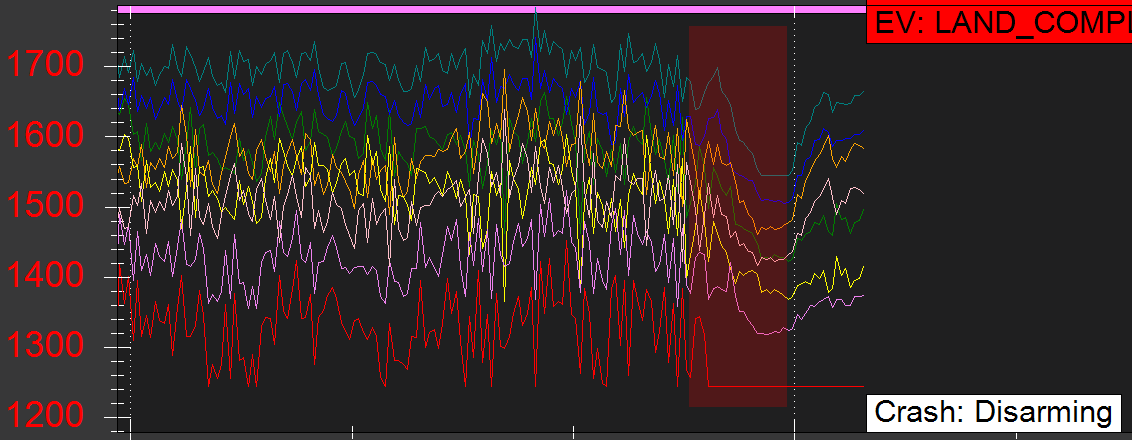
You can see here that the motor outputs are all over the place with some almost shut down while others are at max.
Thank you @Eosbandi for your answer! I agree, the Pixhawk correctly detected the crash, because the drone would probably have come down at that moment. What I don’t understand is why the Pixhawk does not increase the ESC signal despite the inclined position. It was not windy and the copter was flying at very slow speed.
With the vertical imbalance do you mean whether the battery is located on top, for example? No, it has a typical structure. Battery under the drone (60000mAh Li-Ion) and below the camera with 1.5kg. Therefore the weight point is a bit lower because of the long battery.
Thank you @mboland for your time too, I appreciate that! I admit that the copter is maybe not perfectly adjusted, as far as the PID’s are concerned, you can always adjust a copter better and with every component that is built into the copter over time, the PID’s have to be adjusted again. When setting the PIDs, I start with autotune and then adjust manually and with regard to the logs.
I don’t think I could set the RATE values much higher without the copter starting to oscillate. What I could do would be to decrease the STAB values and increase the RATE values instead.
I also noticed that the copter could have come down earlier, there was a similar peak. But I don’t see where the pixhawk try to save the craft?
I think the reason for the engine outputs scattered at first glance is the wind, the changing flight direction, as well as the output that is distributed to the upper and lower motprs (X8). Especially when the copter turns around itself then they look very mixed up. Or do you mean in particular the last part of the flight?