Hello everybody!
Seems like I will need your help.
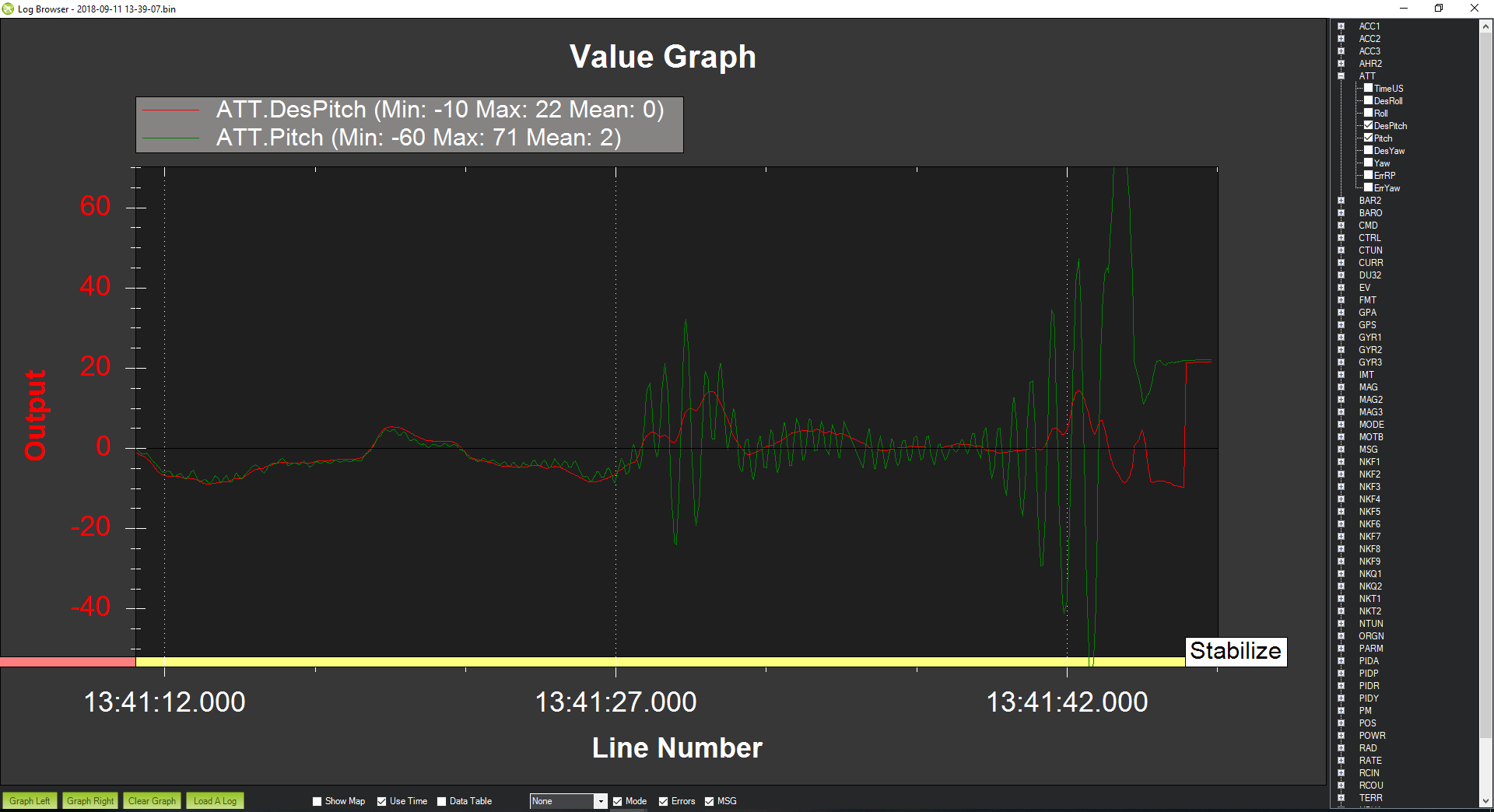
We got the new custom-made drone back in September. We did two test flights with it, it seemed to work fine, but on the second flight, it crashed. It crashed very unexpectedly. We were flying on the height of cca 5m AGL in the Loiter mode, and while there was no input from our side (it was in the same position for some time), it started swinging in the pitch direction viciously (DesPitch and Pitch graph below) and soon (a few seconds later) crashed. In my opinion, it looks like ESC failure.
The firmware used is v3.5.7.
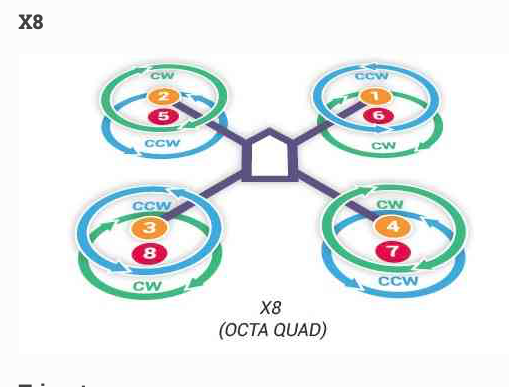
Copter type is OctaQuad X frame
Autopilot is the Cube
I will provide the *.bin file in the attachment of the flight that ended up with the crash and one just few minutes before it when it did not crash.
Here is the auto analysis, but some of the checks are not representative because the cause of the errors happened after the crash (e.g. Test: Compass = FAIL - Large change in mag_field (42.77%)).
Log File C:\Users\Luka Jurjevic\AppData\Local\Temp\tmp6C21.tmp.log
Size (kb) 18951.228515625
No of lines 272453
Duration 0:02:36
Vehicletype ArduCopter
Firmware Version V3.5.7
Firmware Hash b11c6af3
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = FAIL - Large change in mag_field (42.77%)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = UNKNOWN - No IMU log data
Test: Motor Balance = WARN - Motor channel averages = [1555, 1511, 1583, 1508, 1566, 1493, 1569, 1529]
Average motor output = 1539
Difference between min and max motor averages = 90
Test: NaNs = GOOD -
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘THR_MIN’ not found
Test: PM = FAIL - 13 slow loop lines found, max 24.82% on line 107496
Test: Pitch/Roll = UNKNOWN - ‘BarAlt’
Test: Thrust = GOOD -
Test: VCC = GOOD -
So we blamed on the PID settings, but even after fixing the drone (which was quite expensive), and setting up the PID settings I am still not sure the issue is fixed. Also worth to note - PIDs are tunned with the dummy weight, while test flights are performed without any weight (camera payload).
I would appreciate if somebody checks the ATT log data, I am still pretty new to all this and I can not pinpoint the errors.
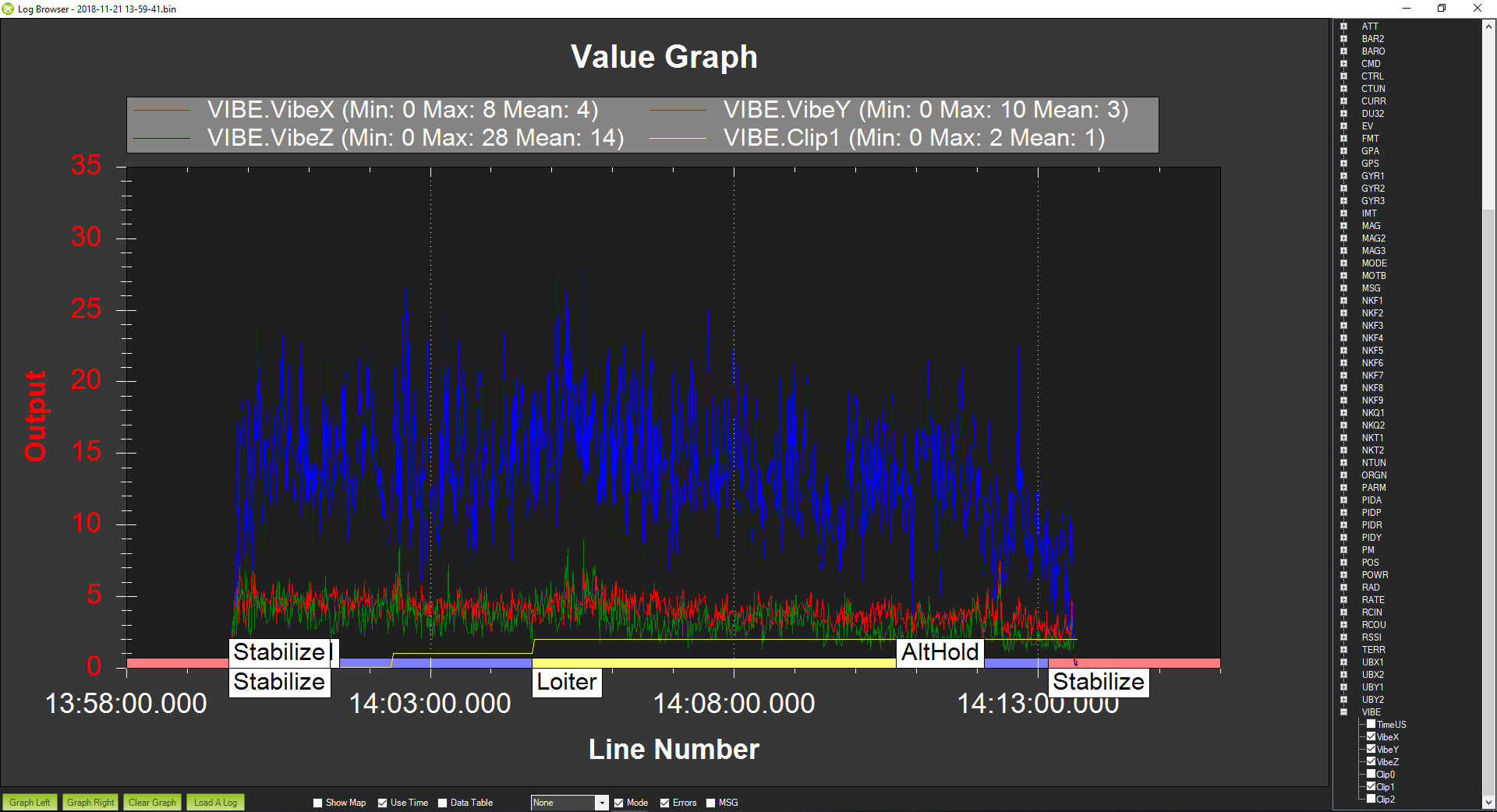
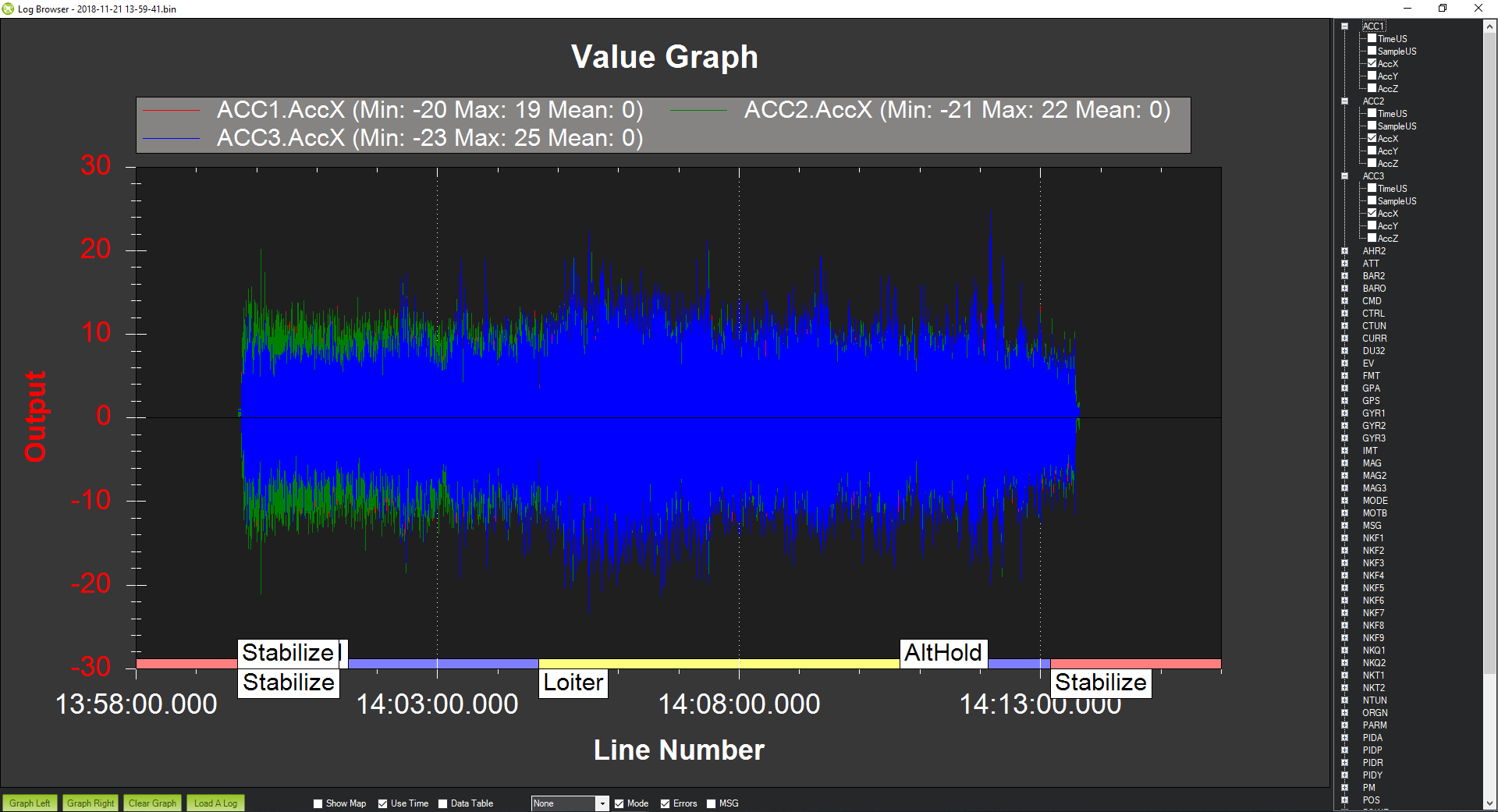
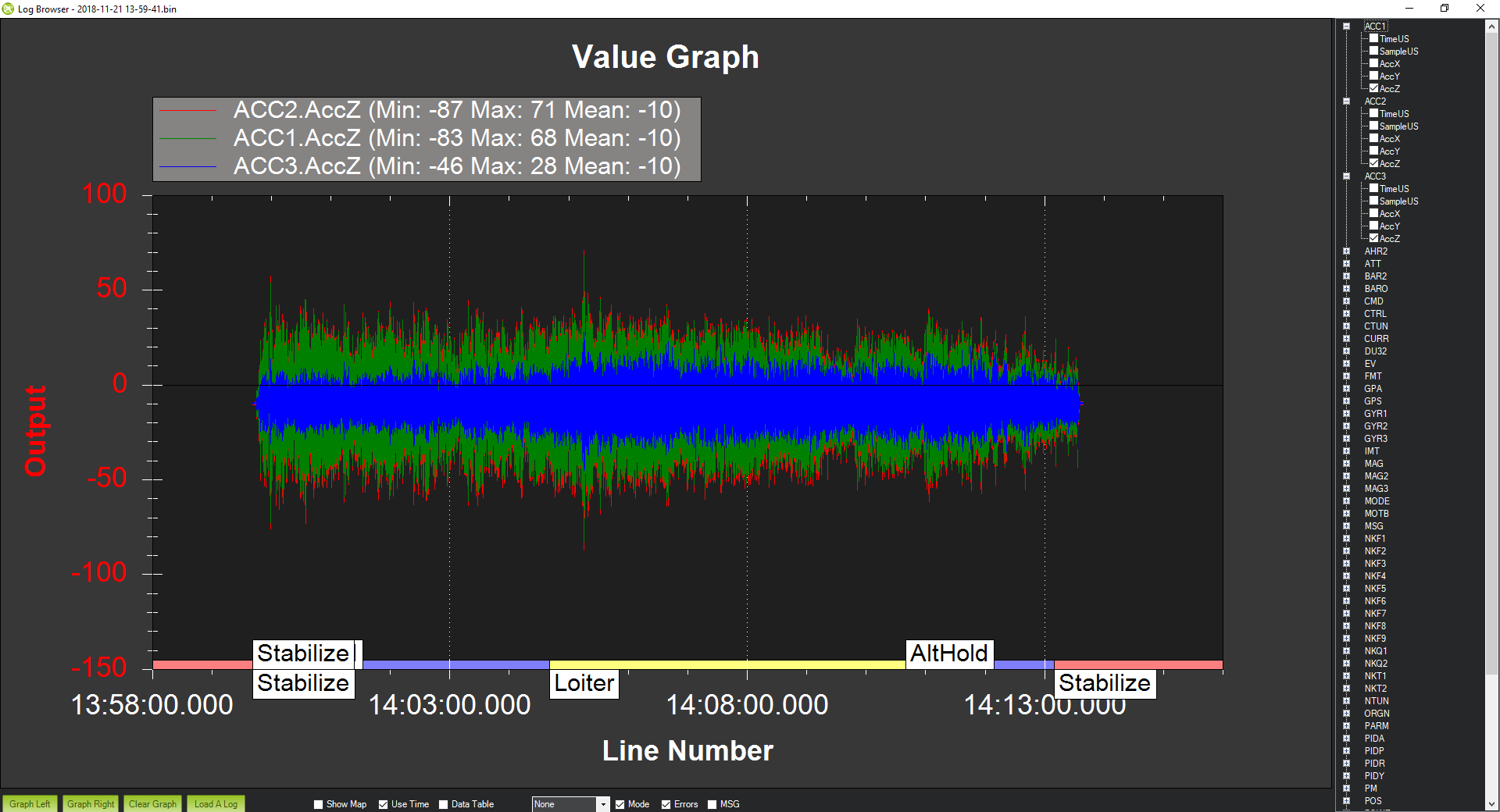
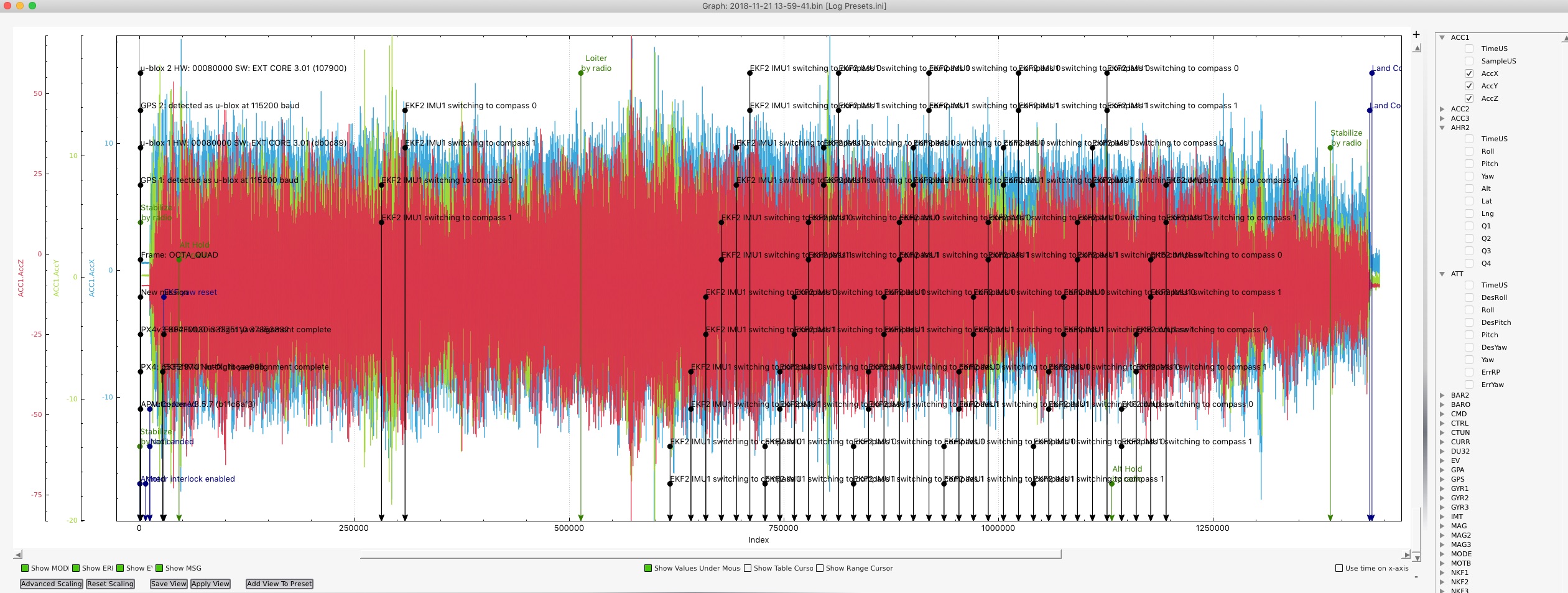
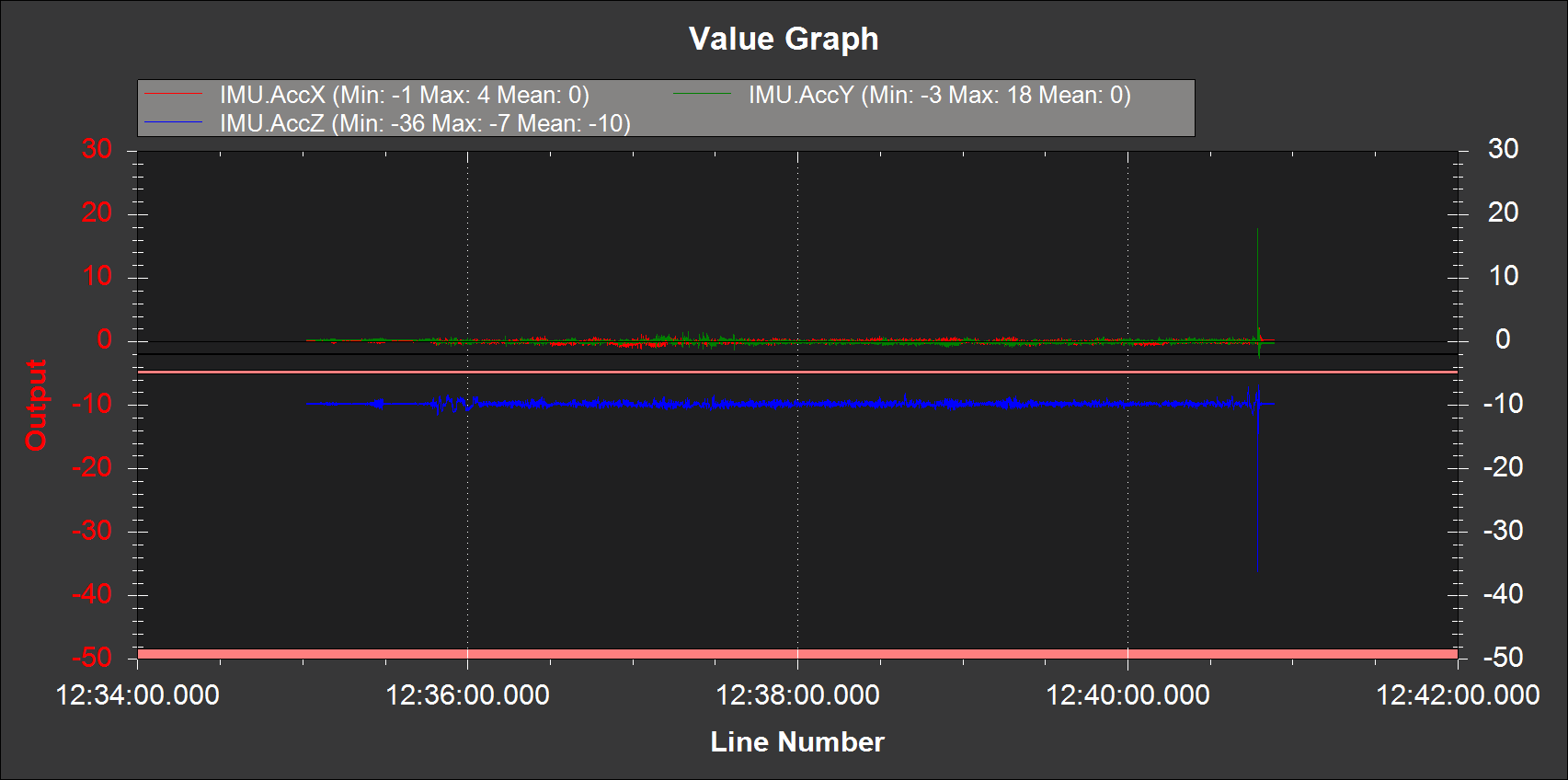
Here are the graphs of the accelerometer data and vibration graphs after fixing it and doing the test flight.
Acc data seems to be way out of the recommended values (±3 for x and y, and -10±5 for z).
Auto analysis:
Log File C:\Users\Luka Jurjevic\AppData\Local\Temp\tmp3CBD.tmp.log
Size (kb) 98867.263671875
No of lines 1443988
Duration 0:13:57
Vehicletype ArduCopter
Firmware Version V3.5.7
Firmware Hash b11c6af3
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = GOOD - mag_field interference within limits (1.79%)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = UNKNOWN - No IMU log data
Test: Motor Balance = GOOD - Motor channel averages = [1646, 1610, 1586, 1606, 1619, 1638, 1615, 1576]
Average motor output = 1612
Difference between min and max motor averages = 70
Test: NaNs = GOOD -
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘THR_MIN’ not found
Test: PM = FAIL - 72 slow loop lines found, max 26.17% on line 1284280
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = GOOD -
LOGS: https://www.dropbox.com/sh/hs4u03ec0invkrj/AACgSkMVP2OJj4mVLhG2rsz9a?dl=0
Any help will be greatly appreciated!
Thanks!

{kind=link}