Unfortunately, my new Opterra 1.2 flew into the ground in FBWA-Mode - not responding to full pulled elevator stick:
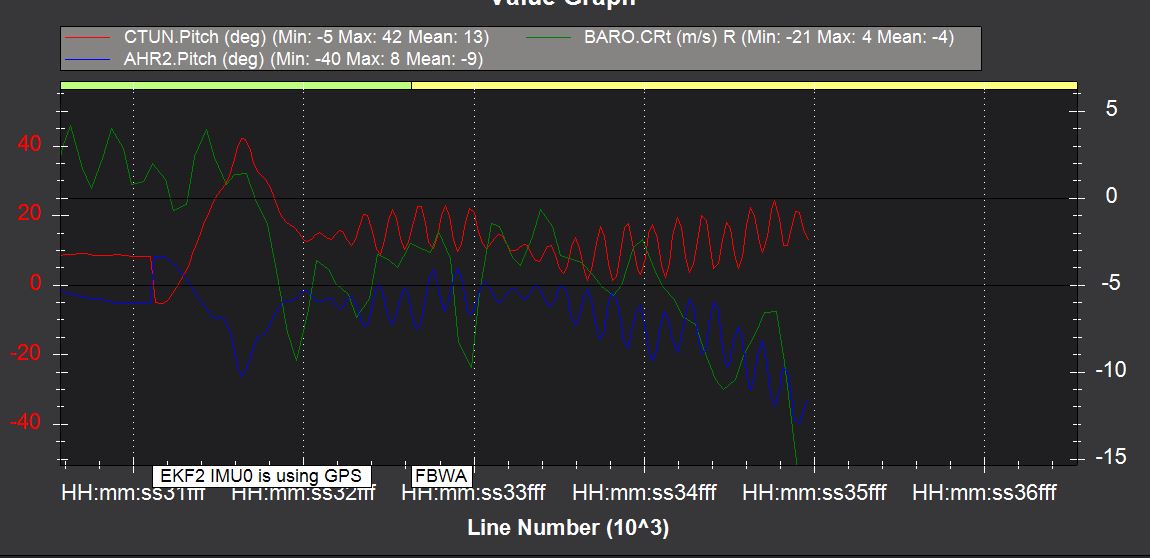
After the start FBWA worked fine. Then i switched to autotune. As the rudders began to flutter, i switched back to FBWA (i would have better switched to manual). After “EKF2 IMU0 is using GPS” msg the Opterra shows no reaction to the full pulled stick and flew with increasing pitch down and speed (25 m/s) into the ground.
Firmware: ArduPlane V3.9.8 (6ea22c9c) ChibiOS d2030d88
Hardeware: Omnibusf4pro 004F0027 4B4B500C 20313548
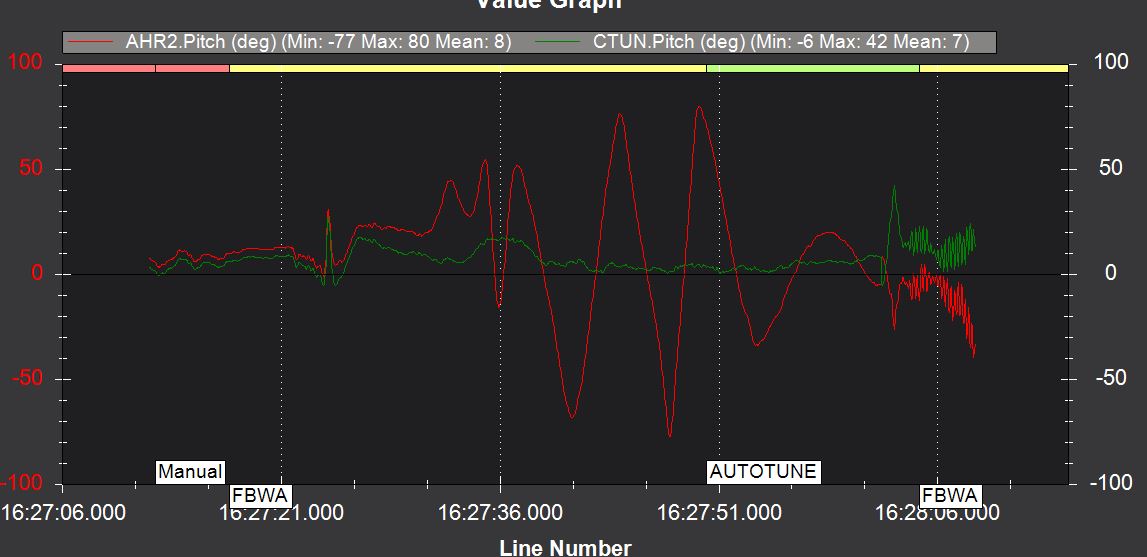
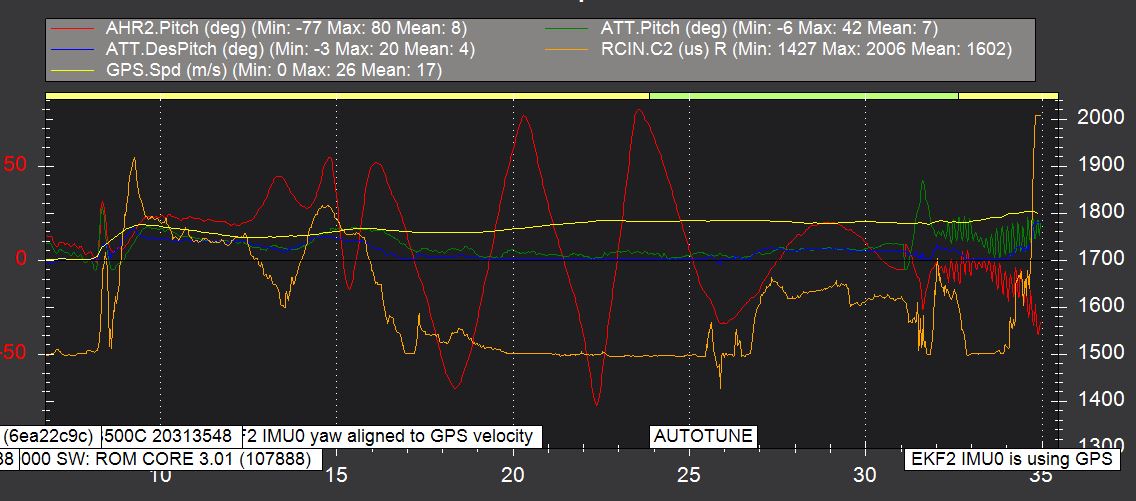
Some excerpts from the logged AHR2 and ATT pitch datas:
Complete logfile and parameters: https://www.magentacloud.de/share/wrfh49rojk
In my opinion, the initial correct datas from ATT was used first. After the message “EKF2 IMU0 is using GPS” the AHR2 datas was used. However, from this moment on they falsely indicated a pitch upwards (!), while reality and ATT values showed (correctly) pitch downwards(!).
At estimated 99.9% of my other flights, AHR2 and ATT msg differ only minimally. I’m interested in why the two estimates deviate so much and in the end are still in the opposite direction
Regards Rolf
