The model was doing a auto takeoff - land mission and because of some noise we heard from the model, we took over from AUTO mode to Q_LOITER, suddenly the model did a small dip about 0.2mt and after a second the model dipped to the motor 1 corner and flipped and crashed. No errors popped up on the messages tab of the mission planner.
I am attaching link to the log file for your reference.
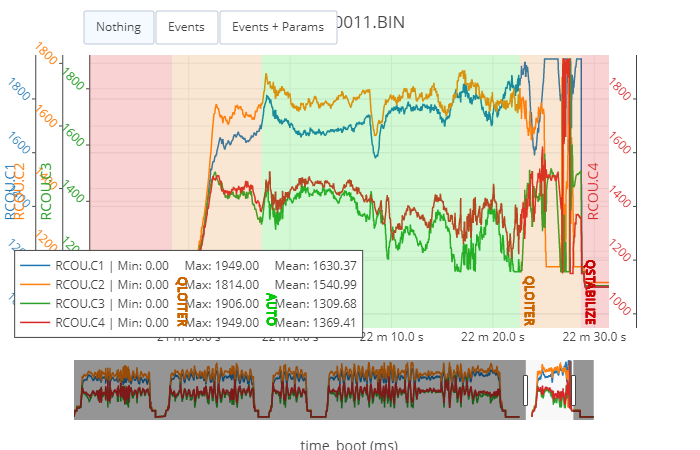
I assume CH1…CH4 are the quad motors. Throttle usage looks strange to me, are all props and motors and ESCs same type and equal distance from center of gravity? Is Q ESC cal done properly?
hi @tkoivuro most probably it may be motor/prop failure as we use higher pitch props and that day it was windy and must have caused the esc/motor to heat up and crash.