Try 13" CF’s. That’s what I have on a ~550 size quad with 3508 380kV motors. I’m on 6S power though, looks like you have 4S.
Yea, a vibe mount like that would be better. Find some softer balls maybe and you can easily add mass on the underside of the upper plate if required. I use these smaller ones on a couple craft with PixRacers. And as I mentioned replace the black balls with softer ones.
I’m using these and they are good given the price. Balance required of course but not terrible out of the box. Wrong style for your motors but maybe they have an equivalent.
Courtesy of 2 friends, I got a 3d printed small mount, and another one gave me a pixhawk mount, from where I removed the rubber damper. Will try this mount, along with the anti vibe standoffs.
For the props, yes, my motors support the T-style prop mount, so I will get the 13x5.5 and 12x5.5 both CF.
Also, I tested the motors without the props and yes, they give a lot of vibrations even without the prop. So I will also try to soft mount them and see what happens.
I’ll be interested to read how your motor soft-mounts work out. Some tests have shown them to make things worse, some better.
You might have to try and balance the motor bell housings. It’s not too hard actually, assuming the shafts are not bent.
Get a very small cable tie (zip tie) and put it around the motor, cut off the excess.
Spin the motor - mission planner motor test
Keep moving the cable tie around the motor bell and retesting, until you find the spot where the cable tie mechanism cancels the vibrations as much as possible.
This gives a good starting point and in this spot you can put a small square of substantial tape, like “hinge tape” used on RC planes. Add layers or change the position to achieve balance.
You can even paint over the tape to stop it coming off, but be aware that will change the balance.
As Shawn says balancing the motor bell might be worth doing but if they are out of balance from a crash forget it. You can tell that by measuring the runout of the motor shaft with a dial indicator. Been there, done that, replaced motors. Also, when following that procedure for balancing I found adding weight to be problematic (it falls off). Reduce weight by filing on the bell 180° from the zip tie mass. No going back though
I would say the success rate for soft mounted motors is very low.
I actually had some great success with motors dampened with 1mm silicon sheet under each motor . Especially on 16mm round arms on tarot frames.
From the images of the OP, the arms looks really sturdy and square actually the whole build looks really sturdy.
Maybe just the fc dampened would be enough.
Possibly but not sure as these I am using have no specs. But check for “Luminier vibration damping” or something similar as they are the manufacturer/supplier to the retailers. Perhaps they are avilable in Germany.
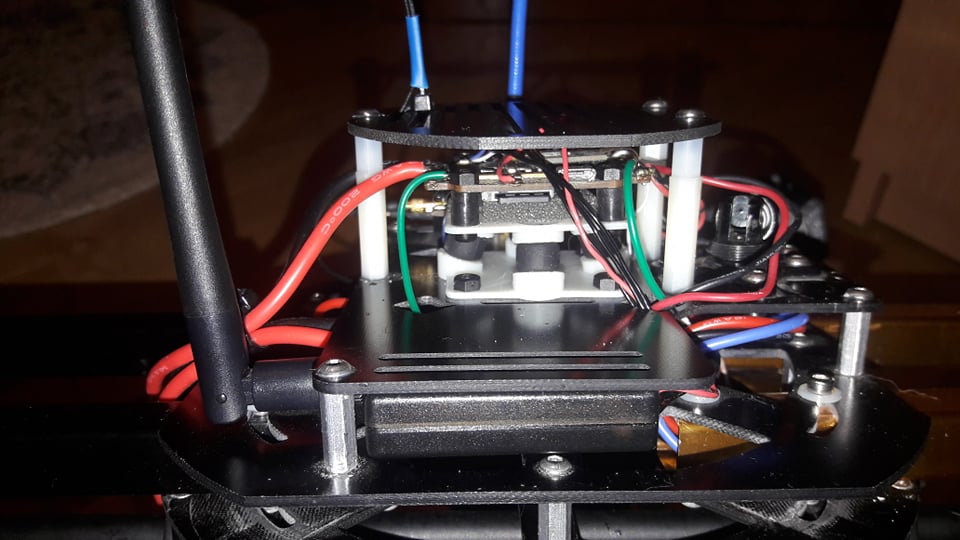
Well, I actually did the dampening yesterday with the ear plug method. I truly wonder how it will work out, but I simply don’t have enough room for a higher FC.
It has the 3d printed platform (I got from a friend), fitted with the pixhawk rubber ball dampers (I got from another friend). Plus it has the anti vibration standoffs.
So the quickest way to test the new setup, was to takeoff then turn to auto, with a loaded mission. I must say, I am surprised how well that went for the first time. Only had time to test with 1 mission, but will definetly do more tommorow.
Looks good! I would suggest a short hover flight, 1 minute is good, in AltHold and log the pre-filter data.Set INS_BAT_MASK (1) . An Auto Mission log is fine too but this basic log has higher initial value.