A wobbly path wastes time and fuel when carrying out a survey on a large body of water. Not to mention the safety hazard should there be another boat on the water and the skipper is trying to work out what heading the craft is taking in order to avoid it.
For a brief period I got it 90% spot on and never saved the parameters, then did a firmware update accidentally and have never got it back again.
My limited knowledge in this field has brought me to the point where I have ‘fiddled’ with only three parameters -
Hi Grant,
Yes, thank you.
Like I said in my other post, I have had to replace the motor and have only just got that up and running so I am back on track.
Thank you
Regards
John
With a real boat AutoPilot we have three primary settings and are very quick and easy to set:-
Navigation Settings for AutoPilot
1 - Arrival Radius - what radius is considered "waypoint reached"
2 - XTE Limit - path width
3 - Steering Response - 1 for high speed (delayed gentle corrections), 2 for low speed (erratic quick corrections)
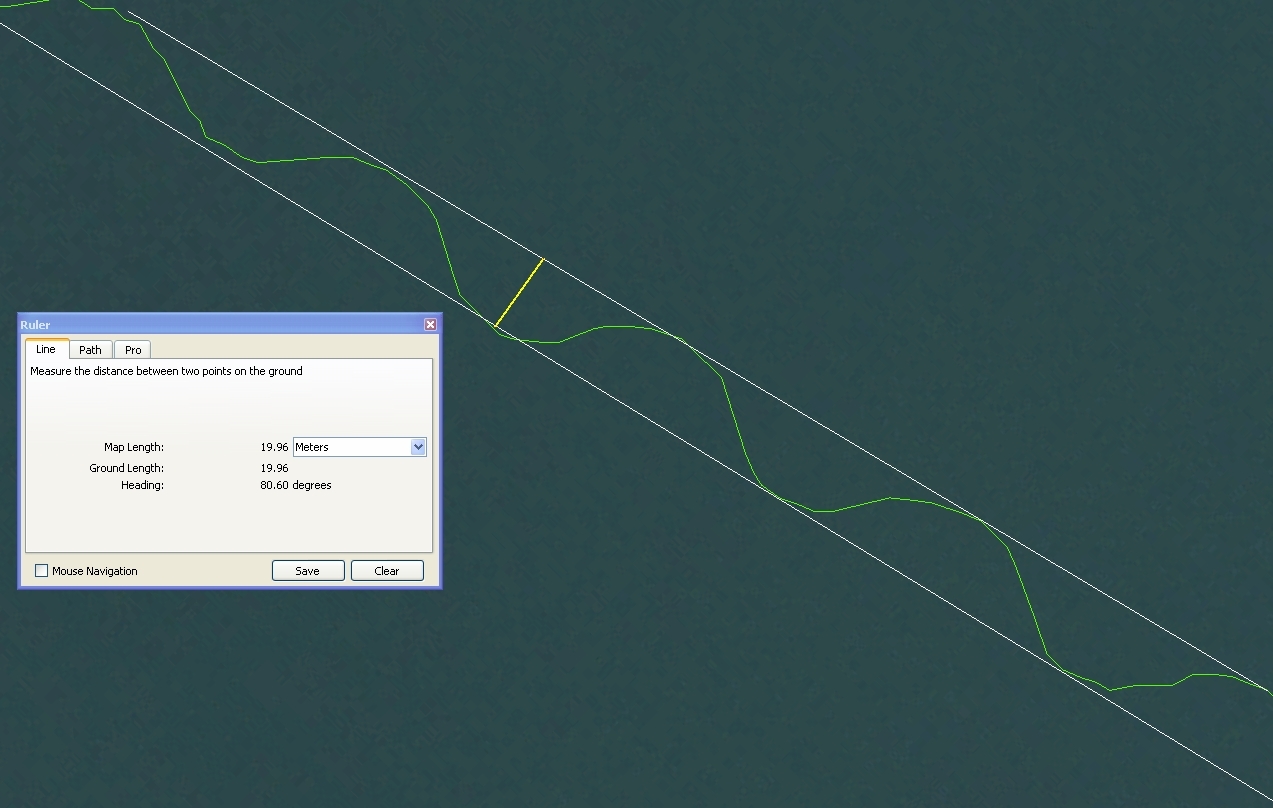
Lets forget about the P and I term at the moment. They both may be a bit low but lets not take that into account. You have the drunken sailor path of not holding a steady course yet the boat seems to be able to turn fairly quick to start moving in the other direction to correct. Try dropping your NAV1_ PERIOD to 15 and see what happens. It looks like about every 60 meters it repeats the same path. Whats the boat speed?
@John lets keep the discussion regarding this topic just in this thread so all the info is together.
David’s suggestion is a good one - give that a whirl.
If you could attach a dataflash log of the wobbly run (assuming you had LOG_BITMASK set appropriately) I can have a look.
Thanks, Grant.
Log information http://ardupilot.org/rover/docs/common-downloading-and-analyzing-data-logs-in-mission-planner.html
Fastest way is to pull the SD card from the pixhawk and copy the logs off. Note I only want 1 log of when the issue occurred. Don’t post all of the as I won’t know which to analyse. And you will need to upload it to dropbox or google drive or whatever you use and post a link here.
You using 3.0.1 or the new Beta. When I upgraded from 3.0 to 3.0.1 I only had a very minor adjustment to make. The sea state your operating in and the characteristics of your boat are extremely different than mine however. Give Grant a log as he is very skilled in this stuff.
Thanks for the vote of confidence David I do my best.
Hi John. If you look at the console tab in mission planner that will tell you what the firmware version number is when the pixhawk boots/reboots.
The dataflash log you attached as some odd parameter settings in it. You have
NAVL1_PERIOD = 1
This should be much higher for your boat. Its almost certainly causing the weaving. Try 10 and go from there. Also note
ARMING_CHECK = 72
which means you are only checking RC and GPS lock at startup. Is there a reason you have changed it to check only these 2 rather then all of them? I know that’s the example given of how to set the ARMING_CHECK values but you should really check them all by setting it to 1.
Yes, NAVL1_PERIOD was one of the settings but as you can see it simply makes the ‘path’ narrower, but in no way stops the ‘wobbly’ trail, as seen here … (red trail)
I was having arming issues and the is why I changed it to 72, but I sorted those issues out and now have it on 1, but the ‘wobbly’ trail is still exactly the same.
Today I intend to play with P and I parameters.
Thank you for all your help, I would be totally lost without your help.


 I do my best.
I do my best.