Hi I have PIXHAWK PX4 2.4.7, while installing firmware copter 4.0.5 which platform I should choose?
fmuv3/fmuv4/fmuv5? How to identify which fmu is compatible my board?
I think Pixhawk PX4 2.4.7 indicates it is a fmuv2 board. Also the mission planner should automatically detect right firmware for your board. I hope it helps
Thanks a lot for reply, yes Mission planner detected as fmuv2 or fmuv3, so i installed fmuv3.
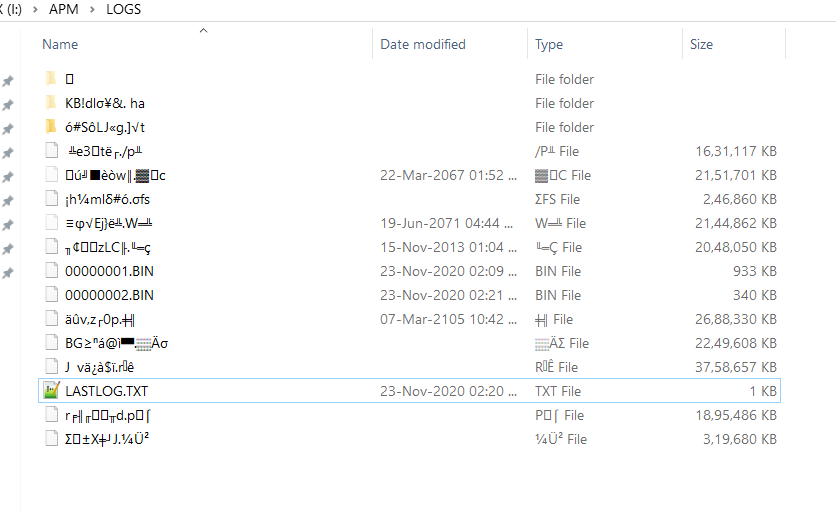
However My Pixhawk 2.4.7 is dumping logs in weird files with unsupported characters as file names.
These files are huge in size and full SD card, also these files are not accessible.
This post might help
Try the bootloader update
https://ardupilot.org/copter/docs/common-bootloader-update.html#updating-the-bootloader
EDIT: actually you probably want to eject the SD card and do a long format in a laptop (not quick format) - maybe it’s gone bad or it’s one of those cheap junk ones that doesnt really have all the storage it’s meant to.
Perhaps the one that came with that cheap junk Flight Controller. 2.4.7 is one of those “it’s better than 2.4.6 just because it has a higher model number”. Then that must mean the 2.4.8 is the ultimate Pixhawk because know one dared to make a 2.4.9!
Thanks you all for responses
This is something new. I think formatting the SD card might help. Also see if your logging parameters are correct.
Have a Nice Day
Today my hexacopter crashed can anybody have look at log and help me what was wrong


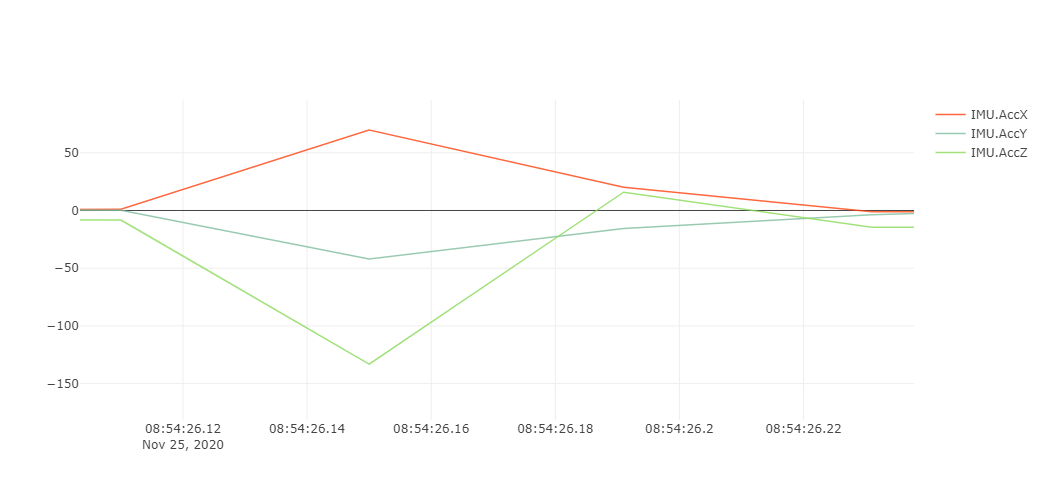
There is a deviation in your desired Roll and Pitch to actual roll and pitch.
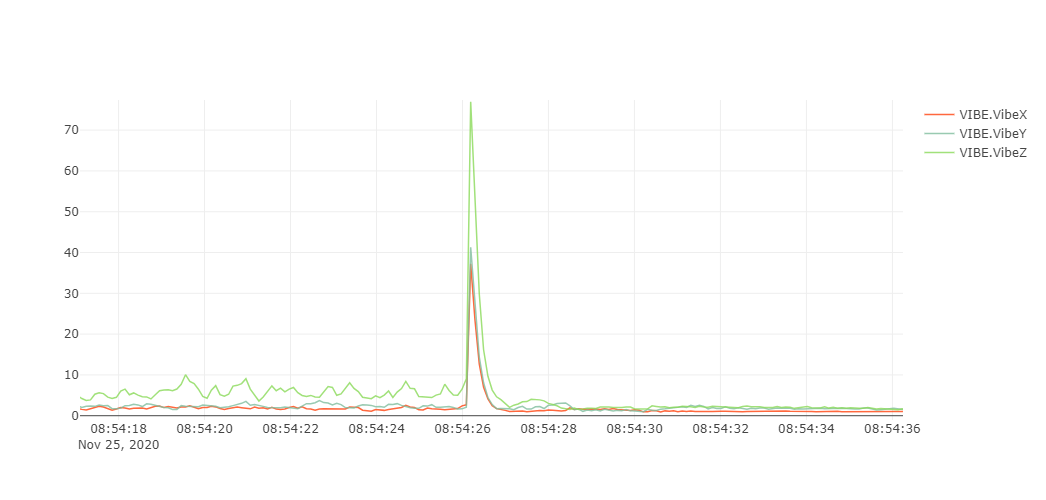
Also at that moment there is also an unusual spike in the vibration. Vibration above 60m/s/s nearly always have problems with position or altitude hold as it messes with accelerometer.
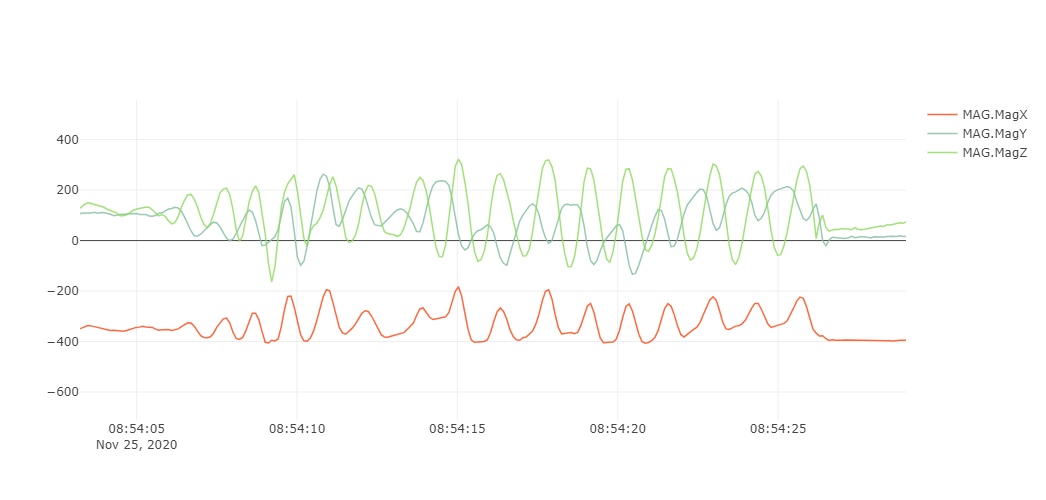
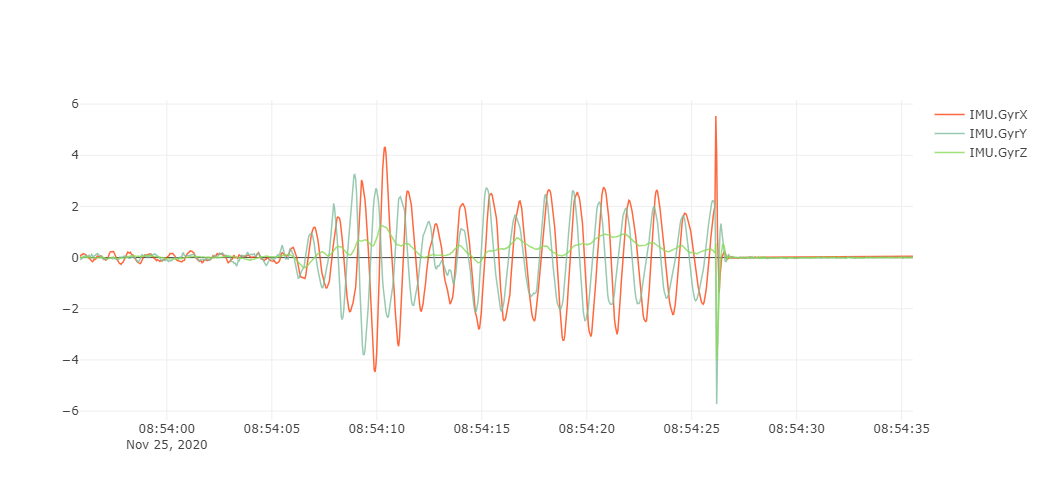
Your Mag is also showing unhealthy behaviour amd also your IMU (Gyroscope and Accelrometer)
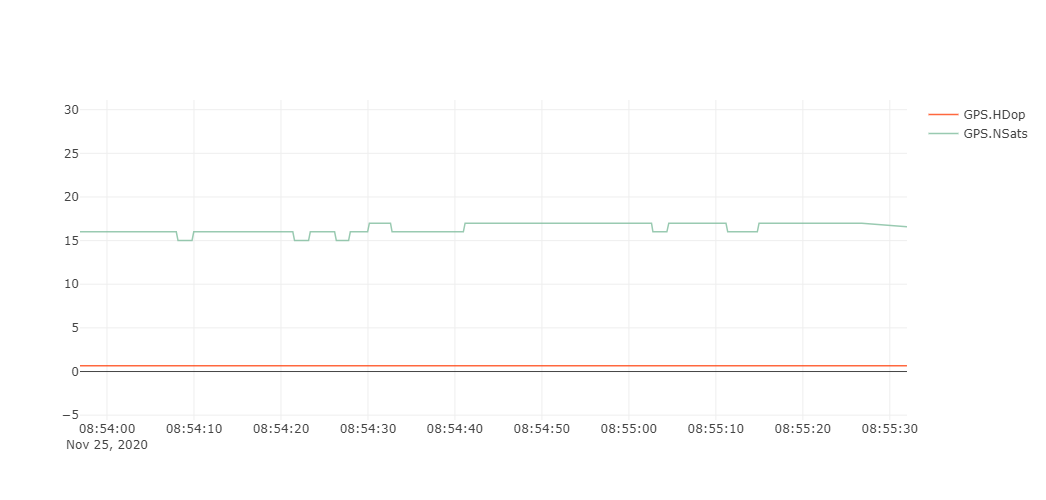
However your GPS shows normal behaviour as below
Reason for this can be
- Magnetic interference of some kind to compass and IMU
- Very high vibration due to mechanical failure leading to unhealthy compass and IMU.
- Hardware failure like motor failure or prop failure.
You can find out more about this here
I hope this helps
Cheers!
Shubham Thakur
When it went too high, i tried to bring down, it was not coming down, so I pull throttle complete down, I hope that is not a reason?
When bringing the copter down quickly, the air from below shakes the aircraft. This may have resulted in very high vibration which led to IMU and Compass failure. Although vehicle should have handled properly but due to some reason it didn’t.
Regards
Shubham Thakur
literally not daring to fly because of this crash, is there any tool which will tel perfectly what needs to be taken care, what was exact reason, can we plot ESC input signals and out from esc?
You can plot RCin and RCout