Hi when pushing my copter to max thrust / speed it yaws about 25 degrees.
Visual observation is:
When traveling forward it yaws anti-clockwise (visual) and traveling backwards it yaws clockwise. Yaw is as much as 25 deg.It is noticeable under high thrust and not so noticeable at lower thrust.
It occurs in Alt Hold, Loiter and Auto modes.
At first I thought it was current affecting the compass but the following rules this out as the root cause:
- I did a calibration to current and no improvement.
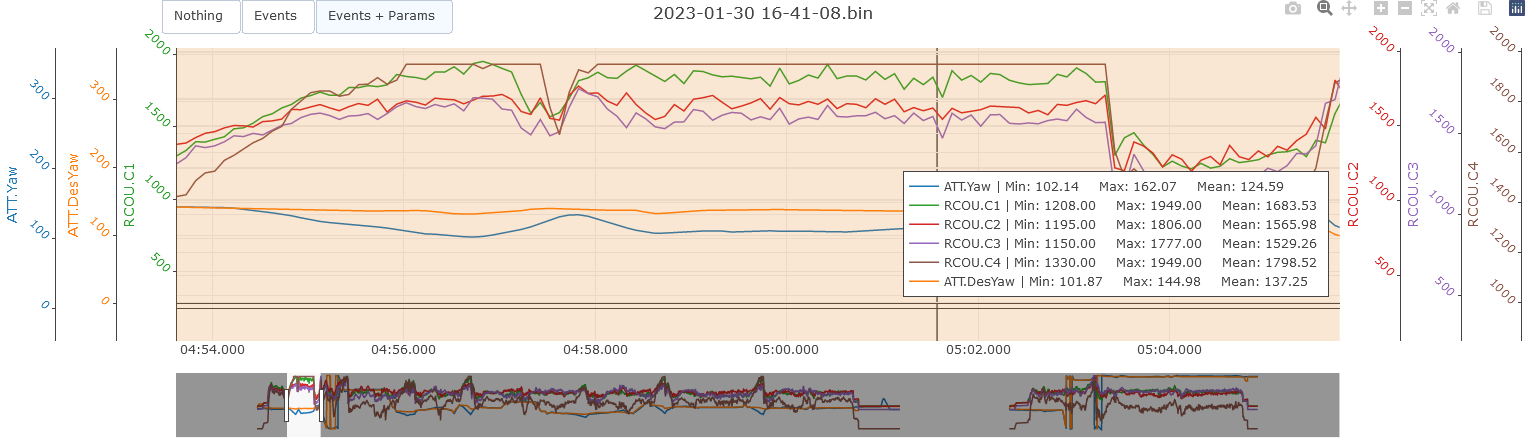
- The logs show the copter yawing in the direction I see it yaw. So the FC knows that it is yawing in that direction. If it was due to compass I’d expect the yaw error to be in the opposite direction to actual travel and the copter would yaw to keep it ‘straight’
- I put the compass on a pole 150mm away from the drone and no change in performance.
This frame is a new frame and is rigid as FCK and straight. i.e. motors are always aligned.
The last run I did activated the EKF failsafe which prompts a question for another post.
Forwards max thrust rotates anti-clockwise
Backwards max thrust rotates clockwise

Log file (prior to the failsafe) WeTransfer - Send Large Files & Share Photos Online - Up to 2GB Free